Use board as HoTT telemetry sensor
- Lalanne Laurent
Introduction
HoTT telemetry was introduced by Graupner into his RC radio and allow connecting various sensors to the receiver.
A Revolution, Revonano or Sparky board can emulate this modules and send telemetry data to the radio.
The following modules can be enabled:
- Vario
- GPS
- EAM (Electric Air Module)
- GAM (General Air Module)
- ESC
Wiring
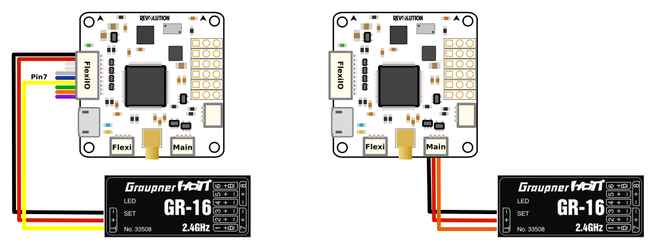
HoTT receiver can be connected to the Mainport or FlexiPort and FlexiIO (receiver port) on Revolution board.
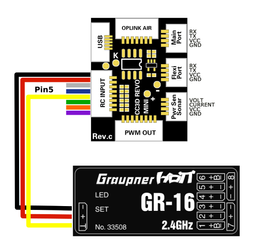
With a reduced size a Mini Revolution board can be used as well, taking in account the receiver port has 8 pins instead of 10 pins in original Revolution board.
Hardware setup
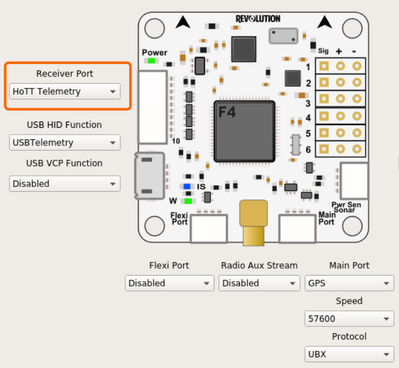
Revolution board can provide HoTT telemetry on FlexiIO port (receiver port), for other boards you need to use the MainPort or FlexiPort and configure the port with HoTT Telemetry.
Two options are available for telemetry output on FlexiIO (receiver) port: HoTT Telemetry or PPM +Hott Telemetry
HoTT configuration
UAVOBrowser
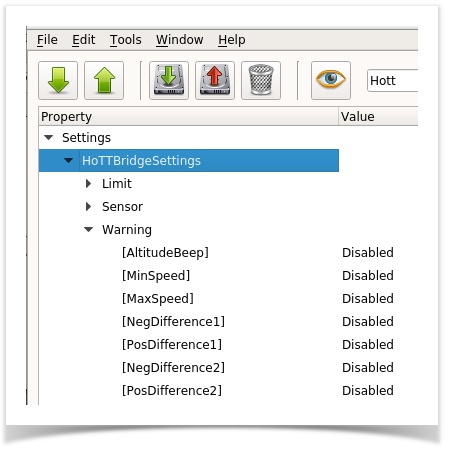
All configuration settings can be found using the UAVOBrowser in System tab.
- Sensors: Enable or Disable the sensor to be emulated
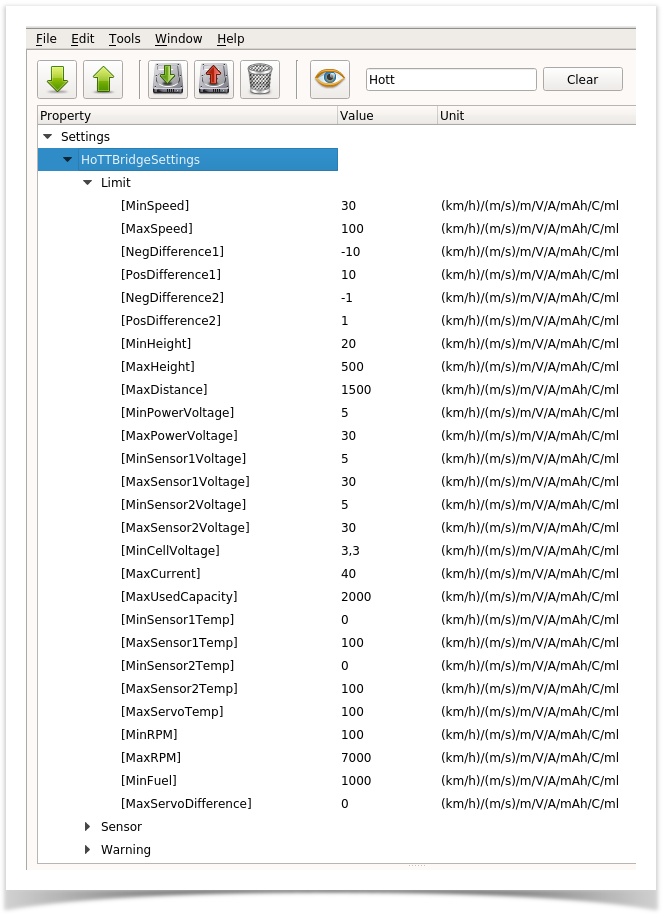
- Limit: Set the limit values used as alarm
- Warning: Enable or Disable alarm
Save settings using the save icon 
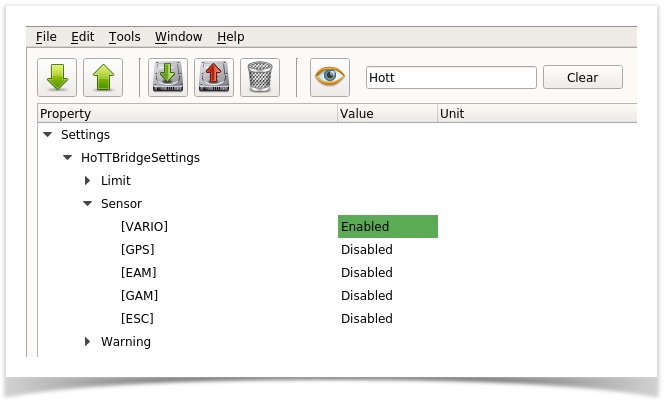
Sensors
According to the sensor emulated here is the Limit/Warning to be configured, if needed:
| Limit/Warning | Vario | GPS | EAM | GAM | ESC | |
|---|---|---|---|---|---|---|
| AltitudeBeep | X | X | X | Altitude announces: 20m, 40m, 60m, 80m... | ||
| MinSpeed | X | Need a GPS | ||||
| MaxSpeed | X | Need a GPS | ||||
| NegDifference1 | X | X | X | Sudden descent | ||
| PosDifference1 | X | X | X | Sudden rise | ||
| NegDifference2 | X | X | X | Fast descent | ||
| PosDifference2 | X | X | X | Fast rise | ||
| MinHeight | X | X | X | Low altitude limit | ||
| MaxHeight | X | X | X | High altitude limit | ||
| MaxDistance | X | Need a GPS | ||||
| MinPowerVoltage | X | X | X | Voltage data need at least a basic voltage divider | ||
| MaxPowerVoltage | X | X | X | |||
| MinSensor1Voltage | X | X | ||||
| MaxSensor1Voltage | X | X | ||||
| MinSensor2Voltage | X | X | ||||
| MaxSensor2Voltage | X | X | ||||
| MinCellVoltage | X | X | Individual cell voltage is calculated, not measured. | |||
| MaxCurrent | X | X | X | Current need a Current sensor | ||
| MaxUsedCapacity | X | X | X | UsedCapacity need a Current sensor | ||
| MinSensor1Temp | X | X | Sensor1 = Gyro temperature | |||
| MaxSensor1Temp | X | X | ||||
| MinSensor2Temp | X | Sensor2 = Baro temperature | ||||
| MaxSensor2Temp | X | |||||
| MaxServoTemp | ||||||
| MinRPM | X | X | X | No RPM sensor connected to the board | ||
| MaxRPM | X | X | X | No RPM sensor connected to the board | ||
| MinFuel | X | No fuel jauge sensor connected to the board | ||||
| MaxServoDifference |