Revo Attitude Configuration
- Lalanne Laurent
Calibration
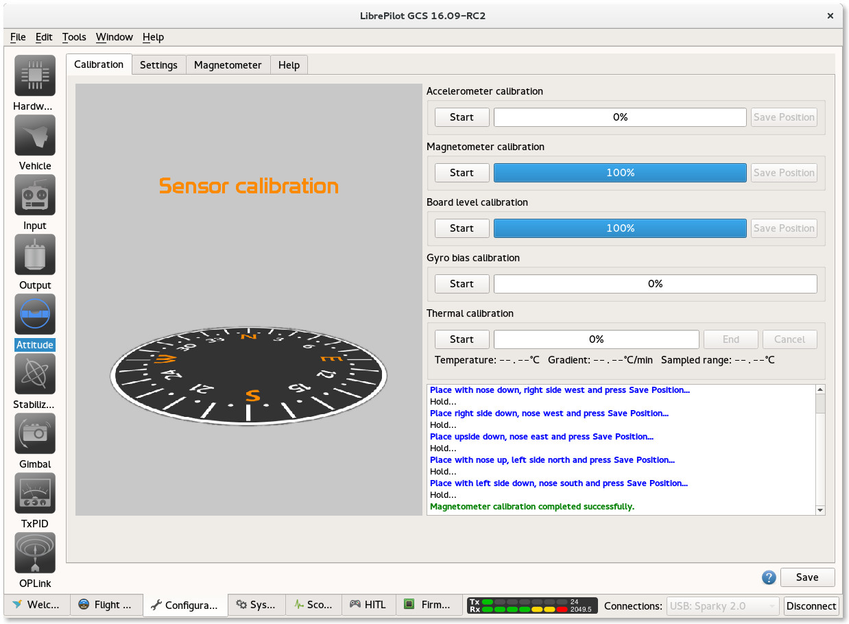
This tab allow sensor calibration for best results and accuracy
For detailed information how to setup this stage look the Sensor calibration page.
Settings
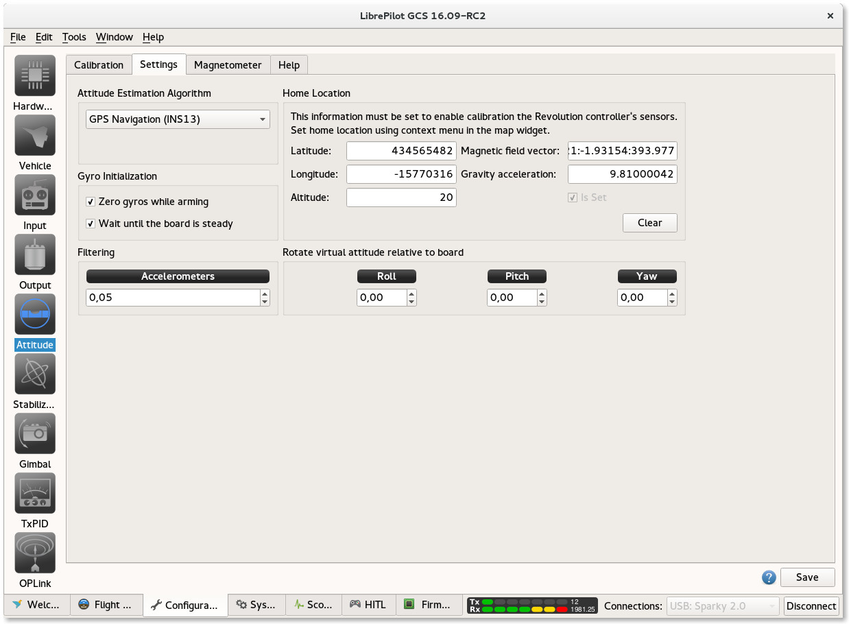
Attitude Estimation Algorithm
You can choose between Basic(Complementary) or GPS Navigation (INS13).
GPS Navigation (INS13) is needed for extended features like GPS Assist, Position Hold or Return to Base.
Home Location
Needed for Magnetometer calibration : From current GPS data or manually using OPMap
Look the Setting Home location page for more details.
Gyros Initialization
Those options allow gyro initialization while arming and safe initialization that wait the board is steady.
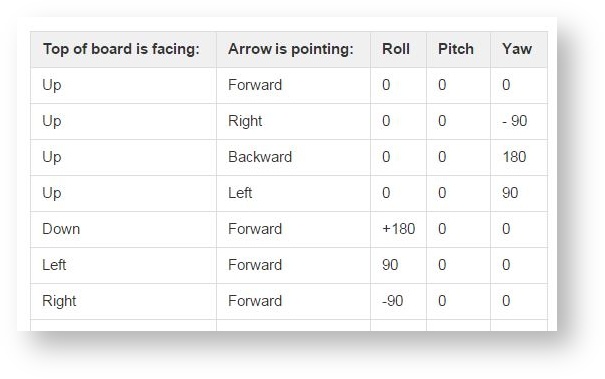
Virtual Attitude rotation
This is where the orientation of the flight controller relative to the airframe is set.
Virtual rotation chart for common board orientations, please double check settings using PFD (Primary Flight Display) in Flight Data tab.
Filtering
If you experienced drifting issue while hovering you can try to raise this value or find better balance for your propellers.
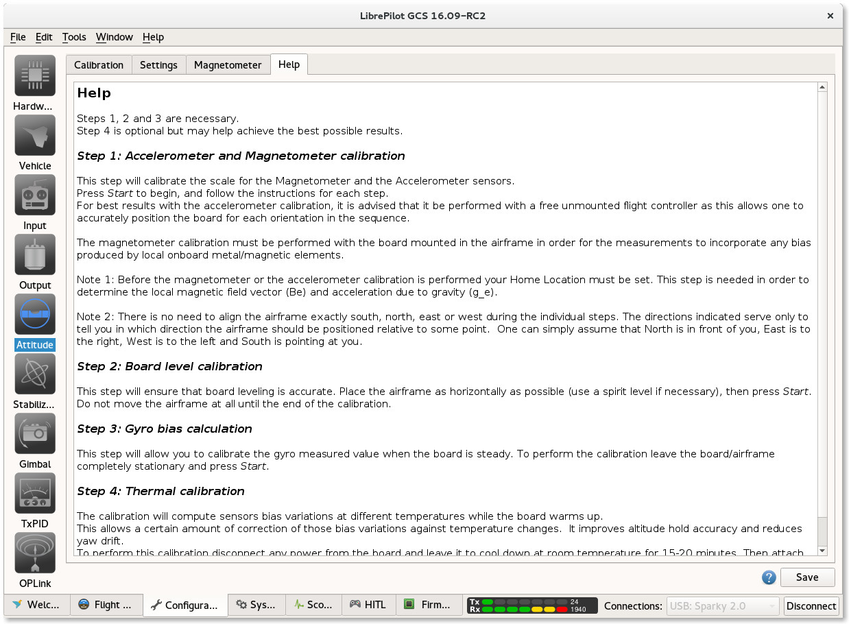
Help
Do not forget the online GCS help!
Help
Do not forget the online GCS help !