TxPID
- Alessio Morale
- Lalanne Laurent

Module Control
By default, the module is not enabled to "save memory" on CopterControl. If you want to use the module, the first thing you need to do is enable it.
Click the checkbox to Enable TxPID module, then click Save to store your option, pause, and power cycle the board.
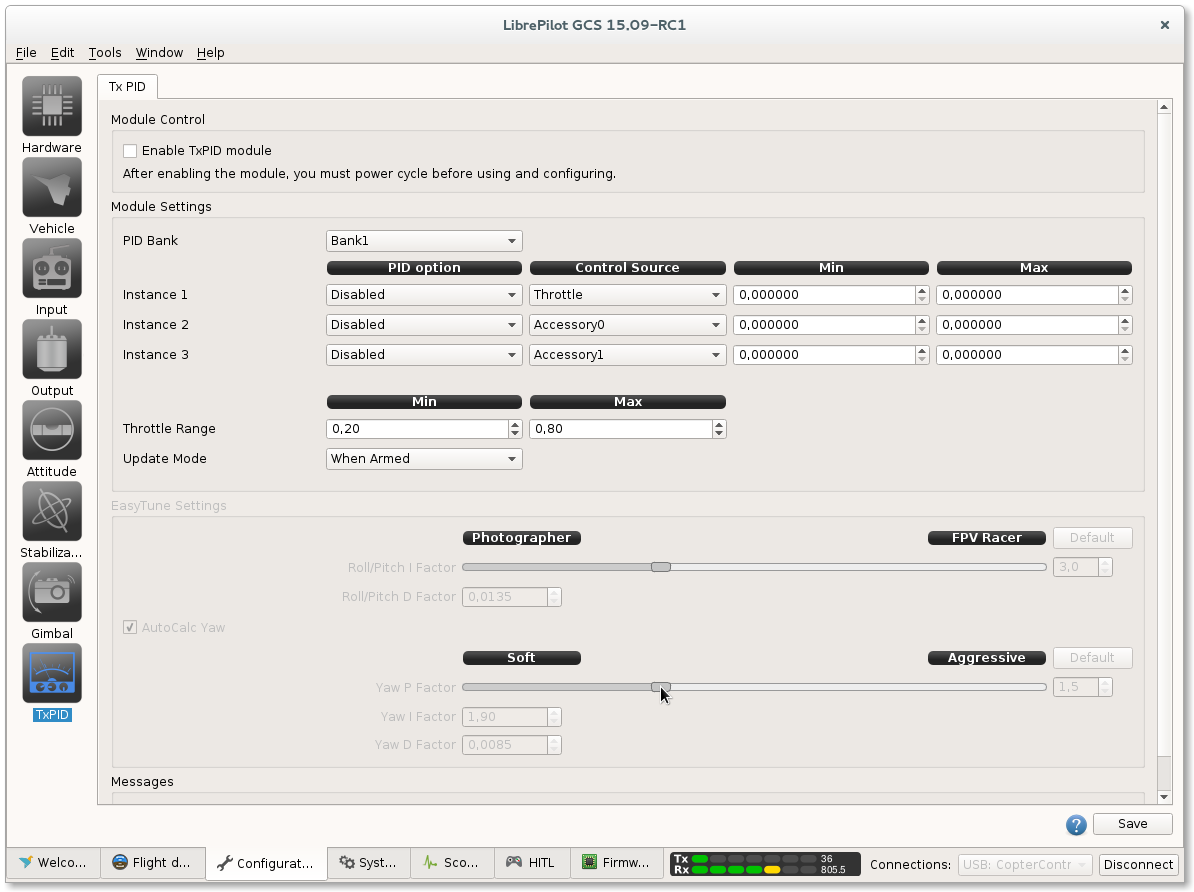
Module Settings
You can adjust a maximum of 3 independent instances. Each instance can control a stabilization value based on a transmitter input.
PID option
This is the stabilization value you want to adjust.
Any value from the Stabilization Configuration page can be selected.
The rate values are mapped to the Rate Stabilization Coefficients (Inner Loop)
The attitude values are mapped to the Attitude Stabilization Coefficients (Outer Loop)
![]() If you want to control both Roll and Pitch values (e.g., in the case of a multi-rotor,) then you can choose the option Roll+Pitch. (***There is no need to link the values on the Stabilization page.)
If you want to control both Roll and Pitch values (e.g., in the case of a multi-rotor,) then you can choose the option Roll+Pitch. (***There is no need to link the values on the Stabilization page.)
Control Source
The Control Source is the transmitter input used with this instance. It can be one of the accessory channels or the throttle channel.
- If an accessory channel is selected, then its range will be mapped to the PID option range [Min..Max] defined for this instance.
- If the throttle channel is chosen, then the throttle range [Min..Max] will be mapped to the PID range [Min..Max] defined for this instance. If the throttle is out of bounds, then the PID Min. and Max. values will be used accordingly.
Minimum and Maximum
The Min. and Max. values specify the range where the Control Source can operate. It is advised to carefully select the minimum and maximum values of the range that you map your control to. If your maximum value is set incorrectly, then the slightest change of your control channel may have a huge impact on the stabilization value.
![]() It is possible to set PID minimum value greater then the maximum value. In this case, increasing the control input will decrease the PID stabilization value. A useful example is to decrease the PID value when increasing throttle on airplanes.
It is possible to set PID minimum value greater then the maximum value. In this case, increasing the control input will decrease the PID stabilization value. A useful example is to decrease the PID value when increasing throttle on airplanes.
The minimum, maximum and control values are bound to the values on the Expert tab of the Stabilization page. Please make sure that you specify the correct Min. and Max. values corresponding with the Expert values.
Throttle Range
When the throttle is used as a Control Source, then the minimum and maximum can be bound to a specific range of the throttle channel. The default values are 0.2 as Min. and 0.8 as Max. The throttle signal range from the transmitter is mapped to a 0 to 1 range, meaning that the PID value will only be changed if you move the throttle between 0.2 and 0.8 (or actually between 20% and 80%) of your TX throttle range.
Update Mode
The setting of the update mode defines how the module updates the values.
- Never: Although the TxPID Module is enabled, it will never update the stabilization values.
- When Armed: The stabilization values will only be updated when the board is armed.
- Always: The stabilization values will always be updated.
Note that none of the stabilization values on the Stabilization page can be manually updated in the GCS if the TxPID module is actively updating! Even if you selected other PID values in the module, you cannot update other stabilization values in the GCS. An easy workaround is to set the Update Mode to When Armed. This allows you to update the other stabilization values through the GCS if the board is not armed.
Example
In the following example we will control the Kp value from the roll rate stabilization on the inner loop.

Suppose we have a transmitter with a variable knob assigned to an aux channel of the receiver. The channel should already be detected and calibrated accordingly on the Input tab. In above example, the channel is bound to Accessory0.
We select the PID option Roll Rate.Kp and assign it to our Accessory0 Control Source.
Furthermore, we set the Min of the range on 0.0015 and the Max of the range on 0.0095.
This way, the knob on the TX will set the value 0.0015 as Roll Rate.Kp when turned on minimum and 0.0095 when fully turned on maximum.
EasyTune
Overview
EasyTune allow modifying Pitch/Roll/Yaw PIDs settings using only two potentiometers on RC transmitter.
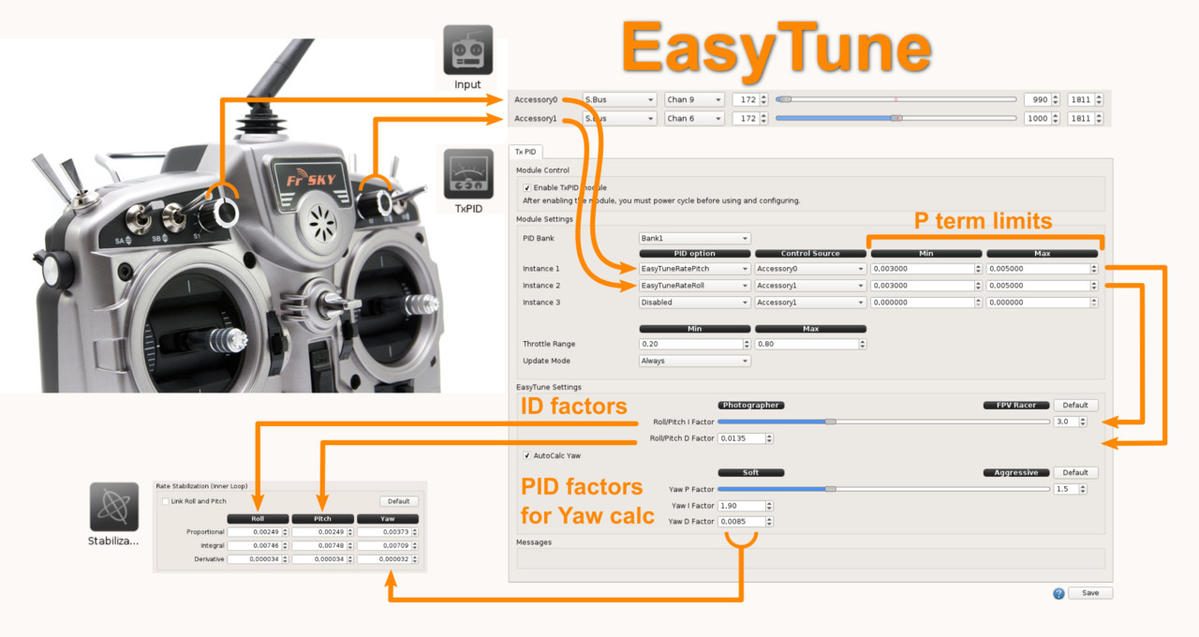
Basic setup
RcInput: Setup at least one variable knob as Accessory (two knobs preferred to cover Pitch and Roll axis at same time).
TxPID > Module Settings:
- Choose the PID bank you want to use,
- Setup two instances with EasyTuneRatePitch and/or EasyTuneRateRoll,
- Affect the Accessory input you want for every instance,
- Define limits, this refers to the range you want for the Proportionnal (P) Rate value.
Update mode: You can choose 'Always' initially and look how the PID values change in stabilization tab.
EasyTune Settings:
Please note those factors are the same used in the previous OPTune process / spreadsheet, default values are just fine but you can play later with sliders and see the behavior changes.
EasyTune video setup
Tune
Of course EasyTune need to be used in flight, FPV is preferred so every knob change can be monitored while doing flip/rolls.
Flight need to be "oscillations free" and stops after a roll or pitch, without rebound.
After successful tuning, the PID values can be copied as "static" PID settings in others PID banks and TxPID module disabled.
Please note the TxPID can be temporary disabled setting the Update mode to "Never".
Saving Values
It is important to note that the adjusted values are not stored permanently onto your board (unless you have changed other values and saved whole object - see below). If you have adjusted the stabilization values via your TX, then you still need to save these to the permanent Flash memory of your board via the Stabilization tab.
The stabilization values you have been tuning with the TxPID are active on your board as long as the board is not restarted. If you connect the board to the GCS, these values will be loaded and transferred in the Stabilization page. You can now review and save the values permanently.
![]() If the TxPID module was active and you didn't reboot your board, then these updated values are loaded from the board into the GCS. It's important to know that if you want to change and save another value in the Stabilization page you are also saving the values from the TxPID module at this point. The values which were actively controlled by the TxPID module are not permanently stored on the board. But, if you connect the board to the GCS, these values are immediately loaded into the GCS, so you are saving them along with other changes you would make in the Stabilization page. This may sound very normal and logical, but you should remember this when you are adjusting another value in the Stabilization page via the GCS which is not controlled by the TxPID module.
If the TxPID module was active and you didn't reboot your board, then these updated values are loaded from the board into the GCS. It's important to know that if you want to change and save another value in the Stabilization page you are also saving the values from the TxPID module at this point. The values which were actively controlled by the TxPID module are not permanently stored on the board. But, if you connect the board to the GCS, these values are immediately loaded into the GCS, so you are saving them along with other changes you would make in the Stabilization page. This may sound very normal and logical, but you should remember this when you are adjusting another value in the Stabilization page via the GCS which is not controlled by the TxPID module.
If you are unable to store the values at the field then don't worry. Connect the board to the GCS at a later stage. Activate the module again with your controls on the TX in the last known best position and save your adjustments in the TxPID. If doing so, make sure that the module is actually updating the values. If you have specified that the module should only update when the board is armed, then you must arm your board.
![]() Please take caution if you arm your board! Your motors may start if you have configured them to run when armed
Please take caution if you arm your board! Your motors may start if you have configured them to run when armed
Once you have completed your tuning and are no longer using the module, it's advised to disable the TxPID Module. Uncheck Enable TxPID Module, click save and reboot or power cycle your board.
FAQ's