Gps assist
- Lalanne Laurent
- Harold Hankins
Introduction
GPS assist add an extra assistance to a primary flight mode, usually stabilized using Attitude or Rattitude.
This mode assumes you already got a good PositionHold mode without Mag alarms and a well tuned multirotor (or weird behavior may happen in braking mode).
Horizontal logic
When stick are centered, vehicle is locked with GPS in PositionHold mode.
If Pitch stick is moved above the deadband value, the Multirotor exit PositionHold mode and go forward using the primary stabilized mode. (eg. Attitude mode).
Now the Pitch stick returns to his center: GPS assist enter in brake mode, reduces velocity and finally return to PositionHold.
Vertical logic
While braking, any change in throttle enables the Thrust mode defined in primary flight mode.
When in position hold, all Pitch and Roll commands are ignored until throttle is at or below "neutral" for safety reasons.
When the vehicle is in GPS assist position hold mode, you can enter the Thrust mode defined in primary flight mode by raising throttle above neutral.
Define assisted flight modes
Go to Config > Input > Flight Mode Switch Settings
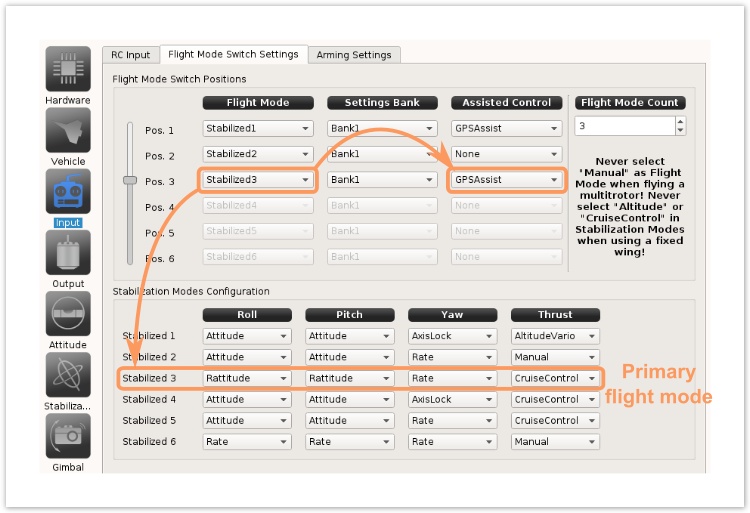
In Assisted control column, the GPSAssist tag add GPS Assist to the third flight mode pos, basically Rattitude mode + CruiseControl
Tuning values
In RcInput tab, look at GPS Assist deadband.
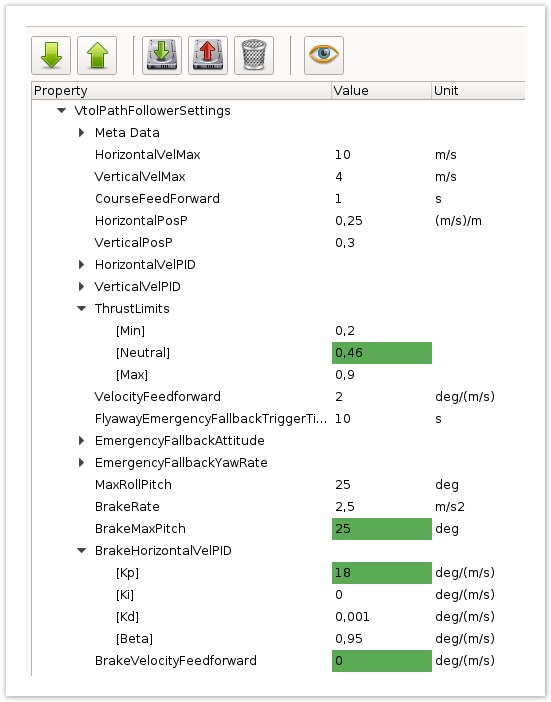
In VtolPathFollowerSettings:
- ThrustLimits > Neutral : The Throttle neutral value to hover.
- BrakeMaxPitch: The max bank angle allowed while braking
- BrakeVelocityFeedforward: A multiplier of the desired velocity for a Pitch/Roll command (test values between 0-2)
- BrakeHorizontalVelPID: PID controller used during brake sequence.