/
Vehicle Configuration
Vehicle Configuration
- Paul Jewell
- Lalanne Laurent
Owned by Paul Jewell
Last updated: Oct 02, 2015
| Key | Description |
|---|---|
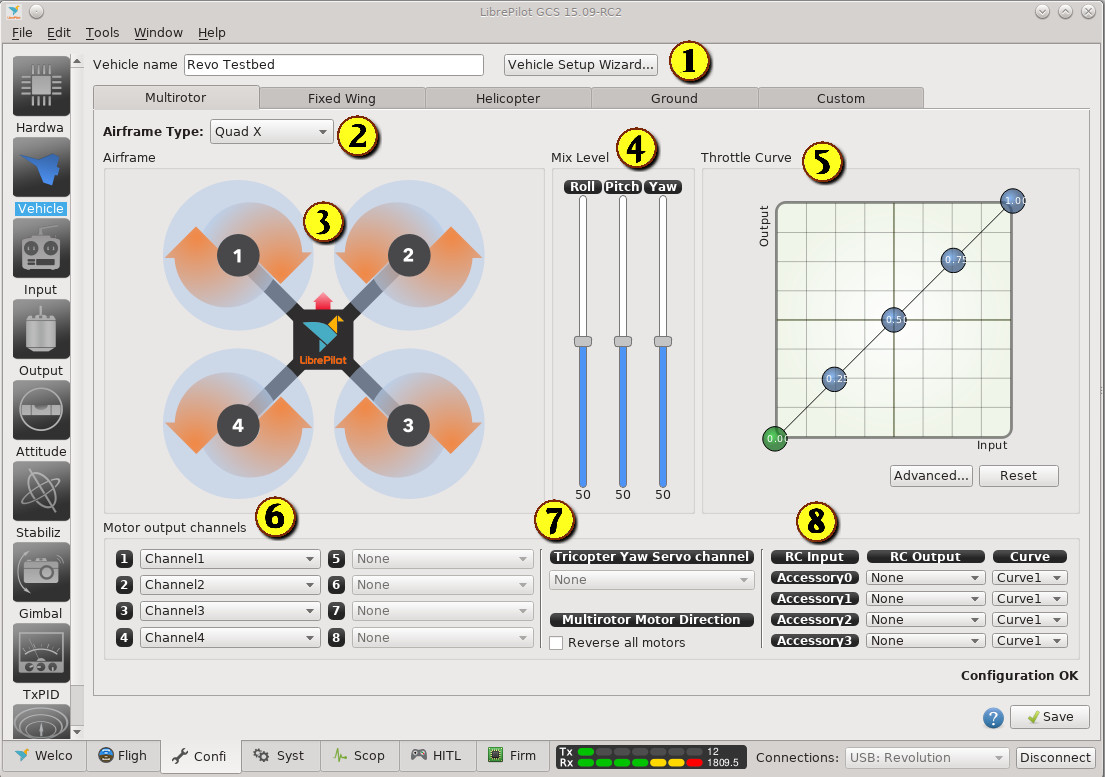
| 1 | Vehicle Name. Allows you to configure the vehicle name on the flight controller. Also a button to allow the vehicle setup wizard to be run. If this is the first time you have set up the airframe, it is recommended to make use of the wizard to step through the setup. |
| 2 | Tabs across the top allow the airframe type to be selected. The tab shown above is for Multirotors family, and the airframe type is selected from the drop down widget at the top. Other airframe tabs are Fixed Wing, Helicopter, Ground or Custom. |
| 3 | The main graphic shows the current airframe configuration and motor identification |
| 4 | The mix levels allow the inputs to be mixed for different airframe configurations. |
| 5 | The Throttle curve is adjustable, to allow the sensitivity to be adjusted around the hover point. This can make it easier to maintain the hover. There is an advanced button which displays a dialog capable of calculating the different points mathematically. |
| 6 | This is where the motor output channels are allocated. Up to 8 motors can be connected. |
| 7 | This setting is specific for a tricopter - the flight controller needs to be able control the tail tilt servo to manage the flight pattern. There is also an option to allow reverse rotation in all motors. Still need to physically swap two wires on Esc output or configure Esc if you want to reverse motor rotation. |
| 8 | Currently only available for Multirotor frame type : Up to four accessory channels can be mapped to any of the output channels, useful for lost buzzer or gimbal. |
Remember to save once the configuration is complete, but you cannot save if board is already armed.
, multiple selections available,
Related content
Output Configuration
Output Configuration
Read with this
Multirotor
Multirotor
Read with this
User Manual
User Manual
Read with this
Helicopter
Helicopter
Read with this
RC Transmitter Wizard
RC Transmitter Wizard
Read with this
Finding Your Way Around the GCS
Finding Your Way Around the GCS
Read with this