GPS Flight modes
- Lalanne Laurent
- Harold Hankins
CC3D GPS Navigation
| CC3D and Atom boards do not support GPS navigation features like RTH, PosHold, waypoints... Only Revolution, Revolution Nano and Sparky2 can use GPS for navigation. |

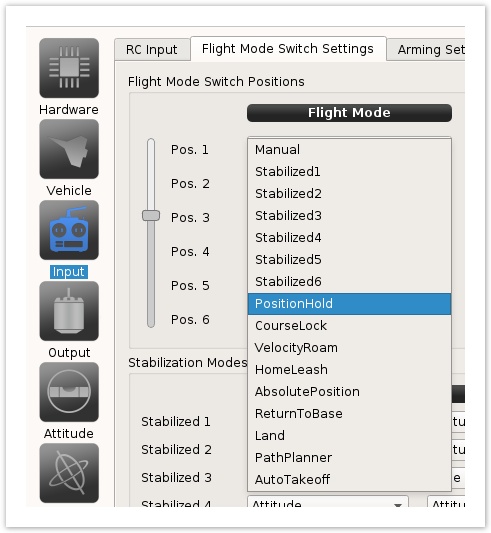
PositionHold
Hold current position, no stick response except Yaw.
Compatible with GPS Assist which enables a brake sequence before entering PositionHold.
See this page: Position Hold
CourseLock
This is a semi autonomous mode.The craft will hold its current course and altitude. The pilot can change both course and altitude using sticks.
Position is adjusted in saved orientation, if vehicle was facing south when mode was enabled, pitch forward will make it go south
VelocityRoam
Hold position, and control it with stick inputs
Position is adjusted in vehicle's own orientation, pitch forward makes vehicle go forward
See also Gps assist page for something similar.
HomeLeash
Hold position, and control it with stick inputs
Vehicle will go further from Home Location with pitch forward, and vice versa. Rolling will make it go left and right respectively when observed from the Base location.
Yaw orientation makes no difference to Pitch/Roll actions.
AbsolutePosition
Hold position, and control it with stick inputs
Roll and Pitch are relative to compass directions: Pitch forward will make vehicle go North, back South, Roll right will make vehicle go East, left West
ReturnToBase
Return to Home Location in a straight line and stay into Position Hold when it gets there.
Altitude will be higher of Home or current location when engaged + offset.
- Offset can be set in FlightModeSettings > ReturnToBaseAltitudeOffset, default is 10 meters
See this page: Return to base
Land
Maintain current GPS position and automatically land the aircraft with ground detection.
See FlightModeSettings > LandingVelocity value (default 0,6m/s)
See this page: Auto Land
PathPlanner
This is a fully autonomous mode.
The craft will fly according to a previously uploaded path plan consisting of waypoints and path actions and ignore any receiver input.
At the end of flight plan, it will be run again. If no plan is present, vehicle will use PositionHold
AutoTakeOff
Automatically takeoff and maintain a PositionHold at FlightModeSettings > AutoTakeOffHeight value (default 2.5m)
See also the AutoTakeOffVelocity value (default 0.6m/s)
Arm vehicle > Switch to AutoTakeOff flight mode and increase Throttle
See this page: Auto Take Off