Altitude Hold
- Lalanne Laurent
- Philippe Renon
- Harold Hankins
- Jim Barchuk
Setup
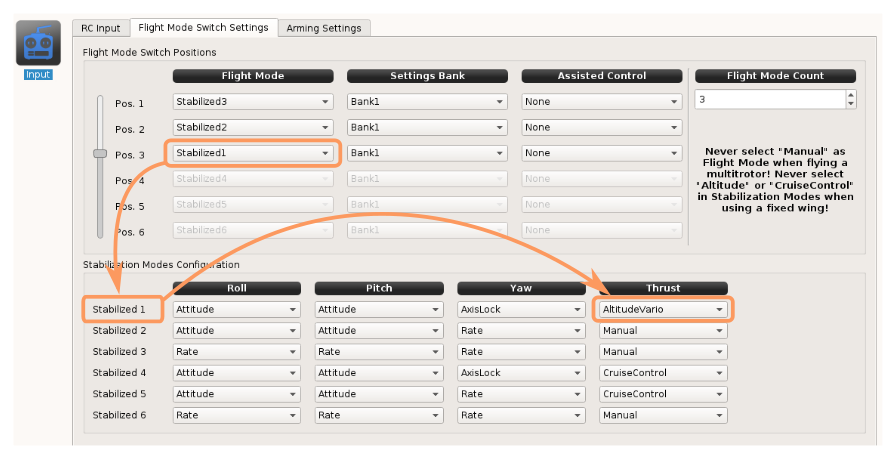
Flight mode setup
Go to the Configuration tab > Input and select the Flight Mode Switch Settings
Every stabilized mode has a Thrust column where you can select between two altitude modes:
- Altitude Hold: When engaged, vehicle maintains current altitude.
- Altitude Vario: When engaged vehicle maintains altitude and its value can be adjusted using the Throttle stick.
CC3D and Atom boards does not have barometer sensor and cannot support Altitude Hold.
Only Revolution, Revolution Nano and Sparky2 can use Altitude Hold.
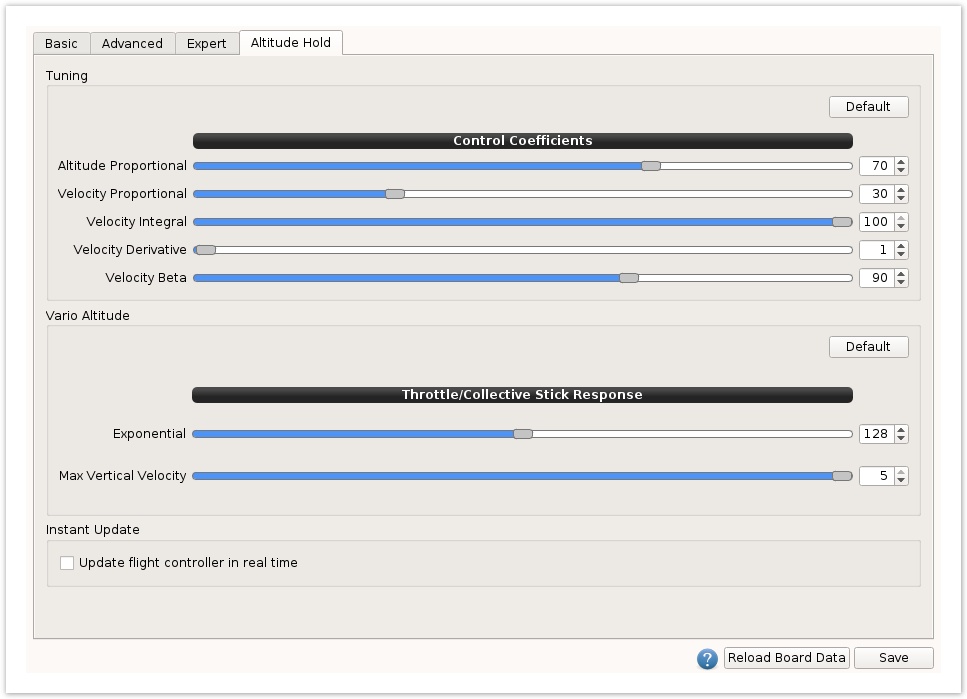
Altitude settings
Fine tuning can be done in the Stabilization > Altitude Hold tab
Every slider has a tool tip that explains what the setting does.
Howto use
AltitudeHold or AltitudeVario modes
Arming
Please note: you can't arm when a flight mode using AH or AV is selected.
In normal condition you should take off, hover and then switch to one of the flight modes using AltitudeVario / AltitudeHold.
AltitudeVario: Around middle Throttle stick altitude does not change, move stick above/below middle stick to change altitude.
When you exit a flight mode using Altitude Thrust, be aware that your vehicle may gain or lose altitude quickly !
Hardware setup
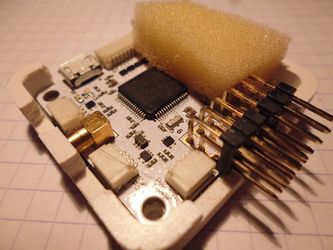
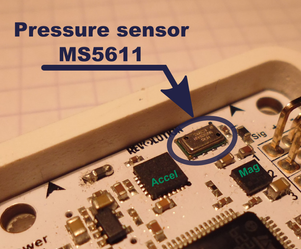
Pressure sensor
For best results you should cover the baro sensor with foam and reduce disturbations from wind.
The foam must be an open cell foam that allows air to pass through.
Another important thing to consider : those sensors are really sensitive to light and lighting changes can produce big jumps in altitude.
Hardware issues
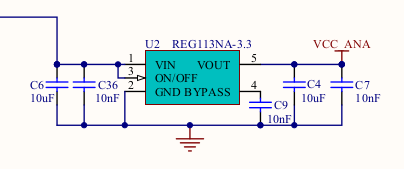
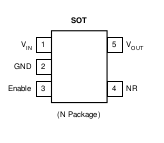
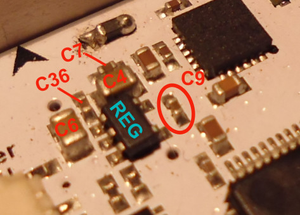
Some clones have problems with regulator ripple that disturb pressure sensor, one bypass capacitor C9 does not match the regulator used as replacement by cloners.
Revolution board
To resolve this issue you can remove the C9 capacitor (better without) or replace it with a 100pF capacitor. Some users reports good results adding another capacitor to regulator output.
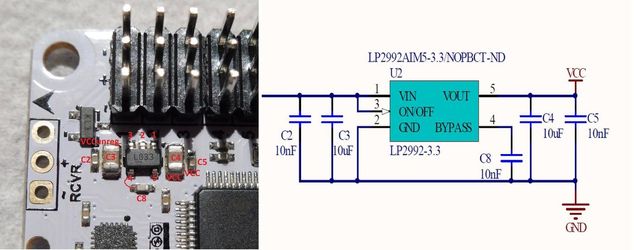
Sparky board
To resolve this issue you can remove the C8 capacitor (better without) or replace it with a 100pF capacitor.
Monitor altitude
Altitude can be monitored using the Scope tab, the second scope display big jumps in altitude

