EasyTune
- Lalanne Laurent
The EasyTune feature uses the TxPID module, this allow adjusting many values using slider or potentiometer in your radio.
Like the previous OPTune method based on Ziegler-Nichols method, the EasyTune feature uses simple factors between P, I, D terms to achieve easy tuning.
 Go to the Configuration tab > TxPID
Go to the Configuration tab > TxPIDBy default, the module is not enabled to "save memory" on CopterControl. If you want to use the module, the first thing you need to do is enable it.
Click the checkbox to Enable TxPID module, then click Save to store your option, pause, and power cycle the board.
Overview
EasyTune allow modifying Pitch/Roll/Yaw PIDs settings using only two potentiometers on RC transmitter.
Basic setup
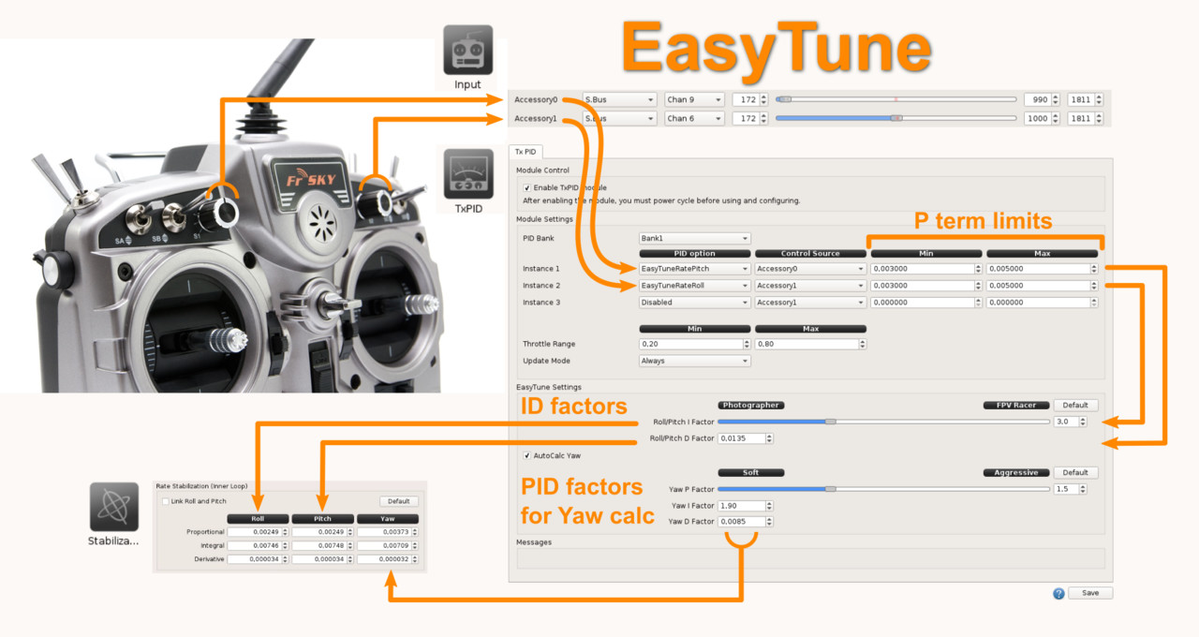
RcInput: Setup at least one variable knob as Accessory (two knobs preferred to cover Pitch and Roll axis at same time).
TxPID > Module Settings:
- Choose the PID bank you want to use,
- Setup two instances with EasyTuneRatePitch and/or EasyTuneRateRoll,
- Affect the Accessory input you want for every instance,
- Define limits, this refers to the range you want for the Proportionnal (P) Rate value.
Update mode: You can choose 'Always' initially and look how the PID values change in stabilization tab.
EasyTune Settings:
Please note those factors are the same used in the previous OPTune process / spreadsheet, default values are just fine but you can play later with sliders and see the behavior changes.
EasyTune video setup
Tune
Of course EasyTune need to be used in flight, FPV is preferred so every knob change can be monitored while doing flip/rolls.
Flight need to be "oscillations free" and stops after a roll or pitch, without rebound.
After successful tuning, the PID values can be copied as "static" PID settings in others PID banks and TxPID module disabled.
Please note the TxPID can be temporary disabled setting the Update mode to "Never".