Cruise Control
- Lalanne Laurent
This page describes how to setup the Cruise Control thrust mode option.
Introduction
Cruise control has two features:
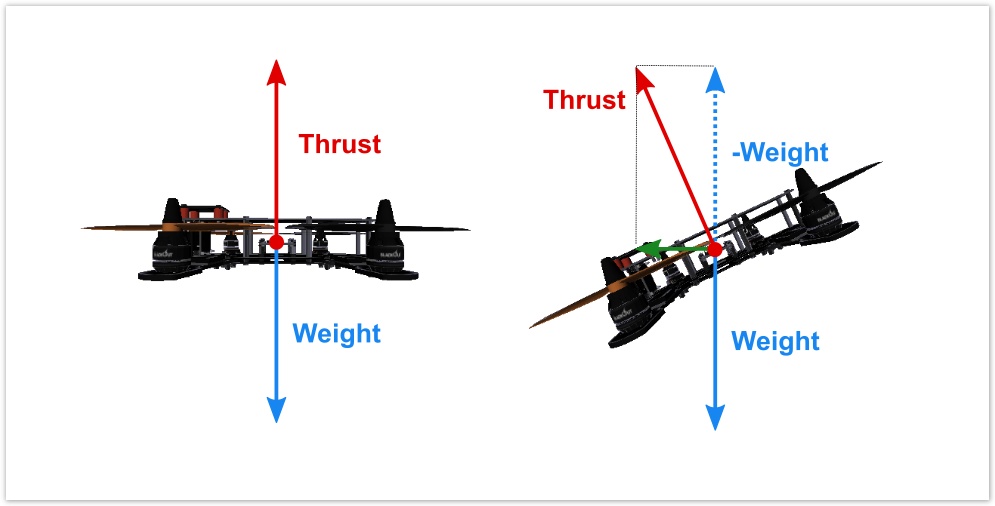
- Increase thrust automatically, based on 1/cos(bank angle)
- Stop motors while in inverted mode.
Theory
While the quad tilts, the thrust amount needed to maintain the same altitude is increased based on 1/cos(bank angle) formula.
Setup flight modes
Go to Configuration > Input > Flight Mode Switch Settings
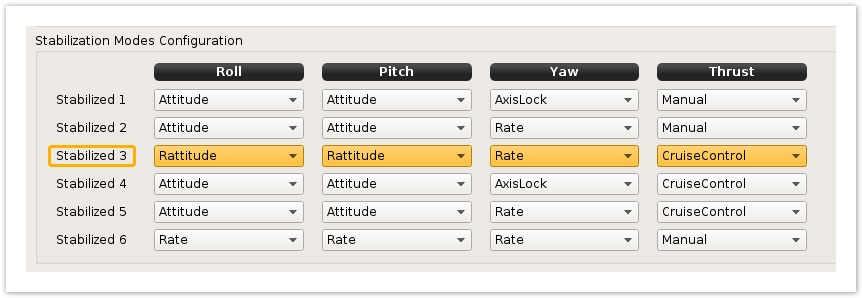
In this example we have set the stabilized3 with Rattitude for Roll/Pitch and CruiseControl as thrust option.
Cruise control settings
Go to Configuration > Stabilization tab > Expert tab (please note all cruise control settings are global and not linked to PID banks)
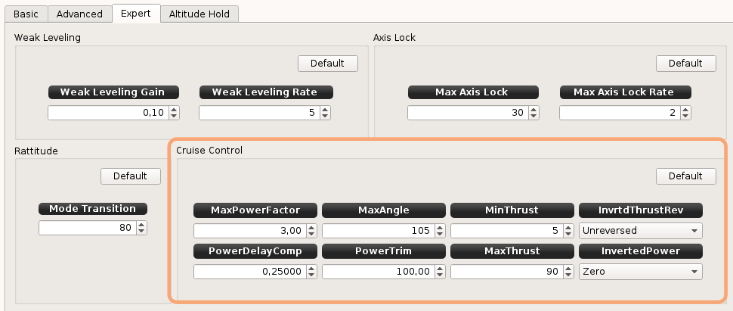
- MaxPowerFactor: This a safety limit. The motor thrust requested can't exceed throttle value stick requested is multiplied per 3 in this case.
- MaxAngle: The bank angle where CruiseControl goes into inverted power mode.
About angle
Be sure the Max angle you set here for CruiseControl remains greater than Attitude mode response you set here: AttitudeSetup Advanced tab
This can stop motors while banking at full angle.
InvertedThrustReverse and InvertedPower control the direction and amount of power when in inverted mode.
- InvertedThrustReverse: CP helis should set this to Reversed to automatically reverse the direction of thrust when inverted.
Fixed pitch copters, including multicopters, should leave this set at Unreversed. Unreversed direction with Boosted power may be dangerous because it adds power and the thrust direction moves the aircraft towards the ground.
- InvertedPower: The amount of power used when in inverted mode.
- Zero: min throttle stick for fixed pitch copters including multicopters, neutral collective for CP,
- Normal: uses stick value,
- Boosted (boosted according to bank angle).
Beginning multicopter pilots should leave this set to Zero to automatically reduce throttle during flips.
- MinThrust: Throttle/Collective stick below this amount disables Cruise Control. Also, by default Cruise Control forces the use of this value for thrust when InvertedPower setting is Zero and the copter is inverted. CP helis probably want this set to -100%.
MinThrust safety
For safety with fixed pitch copters (including multicopters), never set this so low so it won't be possible to stop Cruise Control feature with the throttle stick. Banking the copter in your hand in this state will make the motors automatically speed up.
- Maxthrust: can be set up to 100%
- PowerTrim: If you find that quickly moving the stick around a lot makes the copter climb a bit, adjust this number down a little. It will be a compromise between climbing a little with lots of stick motion and descending a little with minimal stick motion.
- PowerDelayComp: Motor response time to go from min thrust to max thrust. It allows thrust anticipation on entering/exiting inverted mode