Always Stabilized When Armed mode setup
- Lalanne Laurent
Introduction
This page describes how to setup the AlwaysStabilizedWhenArmed (ASWA) mode, similar to the Airmode in BetaFlight.
As the option name says, the multicopter is always stabilized while armed. This means the vehicle is always controllable, even if Throttle is at minimum.
This allow rapid controlled descents or "in weightlessness" maneuvers after a rapid rise.
Configure your Rc transmitter
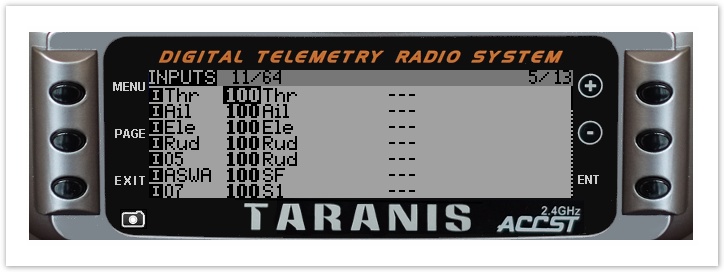
You need to assign a switch to a output in your receiver, like this Taranis example, SF switch mapped to Output6 (ASWA) :
Configure RcInput
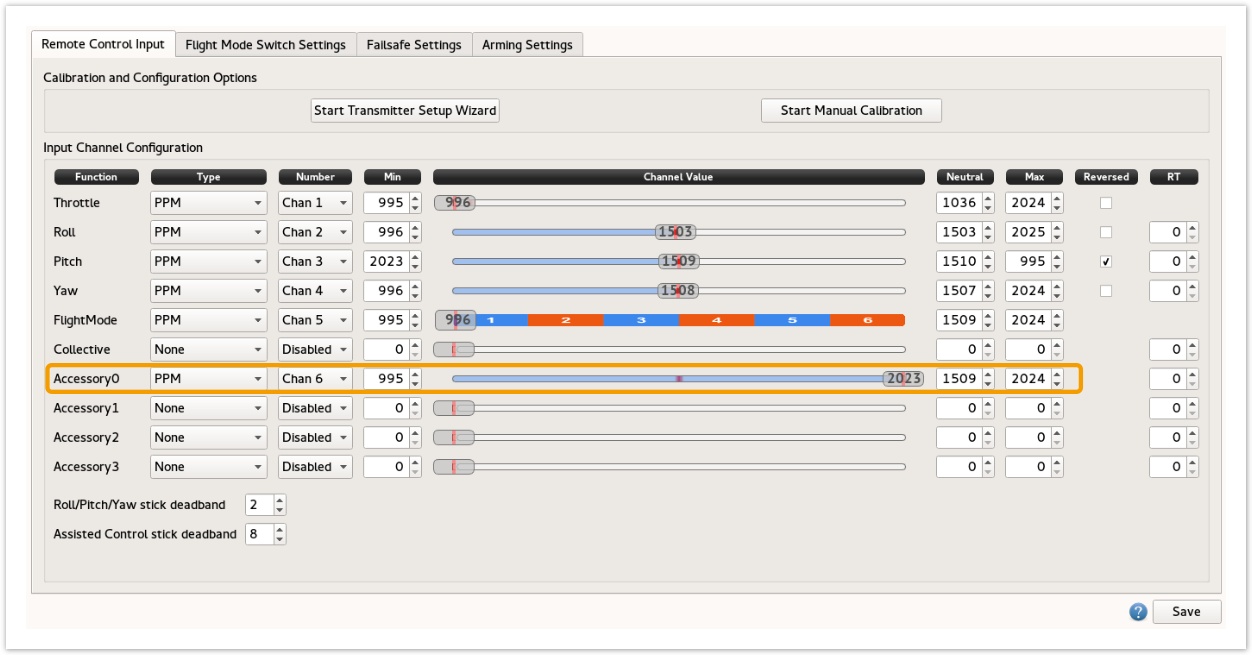
After the changes above in your Rc transmitter you need to redo the Rc Transmitter Wizard and detect the new channel as a new Accessory[0 - 3].
Later this accessory can be easily used to enable ASWA. Here is an example where Ch6 is assigned to Accessory0.
Configure AlwaysStabilizedWhenArmed mode
Using ASWA switch
Go to Config > Output tab
- Check the "Motor spin at neutral..." option,
- Choose the Accessory you want to enable AlwaysStabilizedWhenArmed mode,
- Save settings.

At this point the ASWA switch (Accessory0) can be tested, a warning tell you the ASWA mode is active.

As mentioned above, you cannot arm while the ASWA mode is active.
Using FlightMode switch
The FlightMode switch can be used to enable ASWA for some flightmodes.
You should keep at least the flightmode#1 for arming, the "ASWA" flightmodes are above the Accessory neutral value.
Duplicate the channel used for flightmode RC Input
Set the Accessory you want using the same input channel as your FlightMode input channel, channel5 in this example:

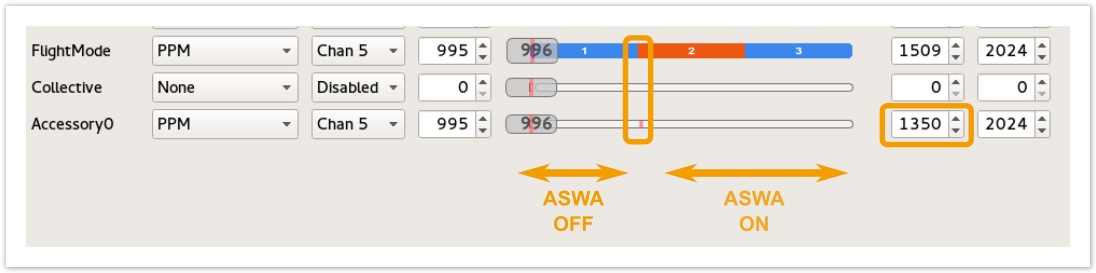
Adjust the Accessory neutral
The flightmode Accessory clone neutral need to be adjusted, in this example the flightmode#1 allow arming (ASWA Off) and above Accessory neutral the flightmode#2 and #3 get AlwaysStabilizedWhenArmed enabled.