/
Position Hold
Position Hold
- Lalanne Laurent
- sam
Owned by Lalanne Laurent
Last updated: Oct 26, 2017 by sam
Set Attitude Estimation Algorithm
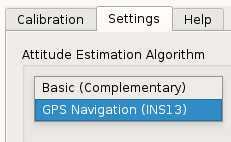
To use all the navigation features using GPS,select the GPS navigation (INS13) attitude estimation algorithm
Go into Attitude page > Settings > Attitude Estimation Algorithm, select GPS Navigation INS13, and Save.
Set the flight mode
Go into Input page > Flight Mode Switch Settings and affect PositionHold to one flight mode position.
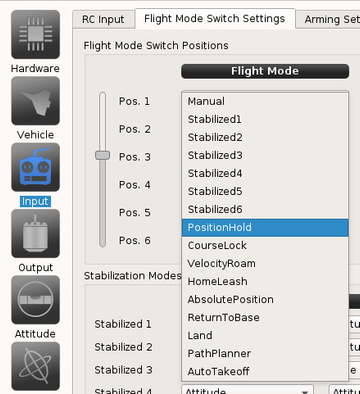
When engaged, PositionHold hold current vehicle position using GPS sensor and without stick interaction.
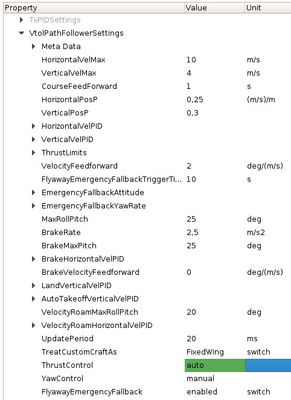
Altitude can be maintained if one VtolPathFollower parameter is set:
Go into UAVOBrowser and find Settings > VtolPathFollowerSettings > ThrustControl set to Auto
Save settings with  button.
button.
, multiple selections available,
Related content
Auto Take Off
Auto Take Off
Read with this
Auto Land
Auto Land
Read with this
GPS setup
GPS setup
Read with this
Setting Home location
Setting Home location
Read with this
GPS Flight modes
GPS Flight modes
Read with this
Sensor calibration
Sensor calibration
Read with this