Auto Take Off
- Lalanne Laurent
The AutoTakeOff flight mode allow an automatic take off and a PositionHold above the take off location.
This assumes the Home Location is set correctly and previously a basic PositionHold mode works perfectly using INS13, the preferred fusion algorithm for all GPS assisted modes.
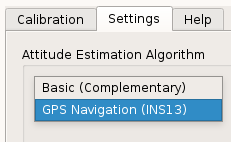
Set Attitude Estimation Algorithm
To use all the navigation features using GPS,select the GPS navigation (INS13) attitude estimation algorithm
Go into Attitude page > Settings > Attitude Estimation Algorithm, select GPS Navigation INS13, and Save.
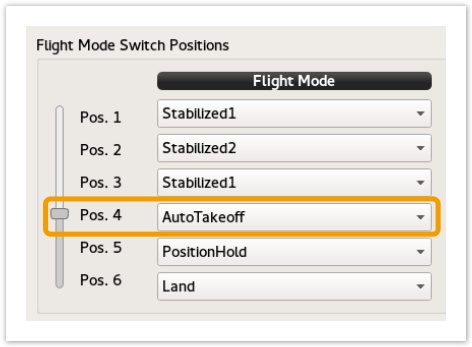
Set the flight mode
Go into Input page > Flight Mode Switch Settings and affect AutoTakeOff to one flight mode position.
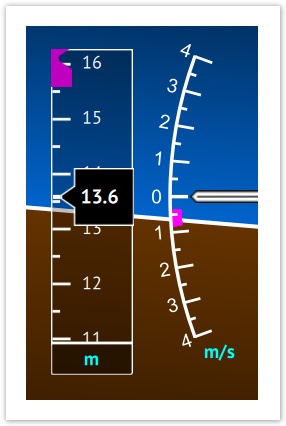
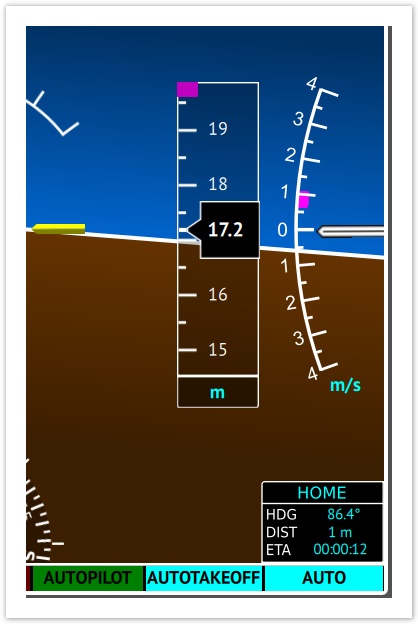
AutoTakeOff settings can be displayed in PFD where the small magenta squares are targets for velocity and altitude.
For safety reasons, before the AutoTakeOff sequence is started the velocity is set to a negative value.
Active AutoTakeOff
How to use
In normal condition you should follow this sequence:
- Switch to AutoTakeOff flight mode,
- Arm with the Throttle stick to minimum (at this point the current altitude is recorded),
- Increase the Throttle value to middle range.
After a small delay the motors start and the take off sequence is started.
When the target altitude is reached, the multirotor go to PositionHold mode.
Arming
Please note: You should not switch to AutoTakeOff flight mode while already flying and using 15.09 release.
AutoTakeOff settings
Basic: Velocity and Height
When engaged, the autotakeoff feature records the current altitude position and add the height to define a altitude target.
Values of height and velocity can be set.
Go to System tab, under UAVOBrowser and search for Settings > FlightModeSettings
- AutoTakeOffVelocity is 0.6m/s by default,
- AutoTakeOffHeight is 2.5m by default.
Please note the minimal height is defined to 2 meters and maximum height to 50 meters.
Do changes you want and save settings using  button.
button.

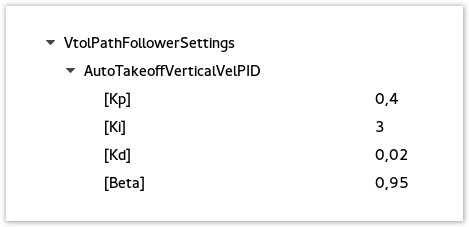
Advanced: Vertical PIDs
Go to System tab, under UAVOBrowser and search for Settings > VtolPAthFollowerSettings > AutoTakeOffVerticalVelPID
Do the changes you want, default values should work in most cases.
Save settings using button.