Auto Land
- Lalanne Laurent
The Land flight mode allow an automatic landing bellow the current position.
This assumes the Home Location is set correctly and previously a basic PositionHold mode works perfectly using INS13, the preferred fusion algorithm for all GPS assisted modes.
Land feature can be used as a next command after a Return to base.
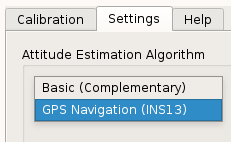
Set Attitude Estimation Algorithm
To use all the navigation features using GPS,select the GPS navigation (INS13) attitude estimation algorithm
Go into Attitude page > Settings > Attitude Estimation Algorithm, select GPS Navigation INS13, and Save.
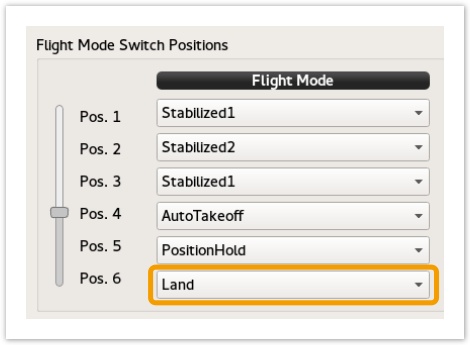
Set the flight mode
Go into Input page > Flight Mode Switch Settings and affect Land to one flight mode position.
How to use
In normal condition the sequence should be like that:
- Stabilize your multirotor above the place where you want to land,
- Switch to Land flight mode,
- Wait automatic descend.
After landing is done, do not switch to another flight mode like Attitude because the Throttle stick should still at middle range.
- move the Throttle stick to minimum.
- Disarm
Landing settings
Basic: Velocity
Go to System tab, under UAVOBrowser and search for Settings > FlightModeSettings
- LandingVelocity is 0.6m/s by default,
Do changes you want and save settings using  button.
button.

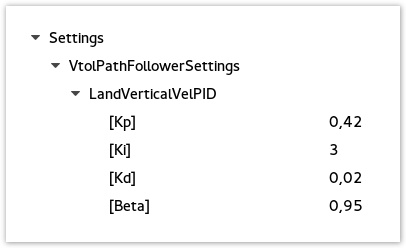
Advanced: Vertical PIDs
Go to System tab, under UAVOBrowser and search for Settings > VtolPAthFollowerSettings > LandVerticalVelPID
Do the changes you want, default values should work in most cases.
Save settings using button.