PFD
- Lalanne Laurent
Introduction
The Primary Flight Data display all information from current board connected to GCS.

Top
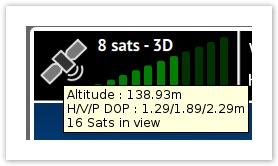
GPS information
This area give information about GPS status, a tooltip can be displayed when mouse over.
GPS availability is linked with:
- MaxPDOP: max error admitted for GPS use,
- MinSatellites: Minimal number of satellites needed
See GPS setup page for more details.
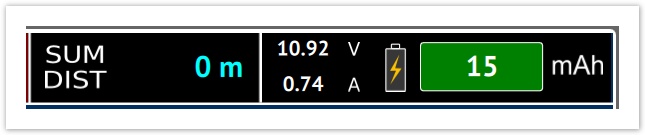
Sum distance
Count distance, can be reset with a mouse click
Battery
Only available when a Current-Voltage sensor is configured. (Not for CC3D/Atom)
Display alarms when energy consumed (mAh) is close to battery capacity.
Waypoint information

When a set of waypoints is loaded (PLAN alarm to green in SystemHealth)
WPT: waypoint number,
DIST: distance to next waypoint,
MODE: defines what the vehicle is supposed to do in this state. It's the primitive executed by the pathfollower, like "fly towards a point", "circle around a point"...
HDG: heading to next waypoint
SUMDIST: total distance since last reset (mouse click on value)
ETA: estimated time for next waypoint
Bottom
Status

Flight time, Arming status, RcInput status, Master Caution, Autopilot active/inactive, Stabilization mode, Thrust mode
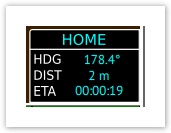
Home information
Only displayed after arming and GPS available. Give information for Home position: Heading, distance and estimated time to join.
Panels
System panel

Link panel
OPLink signal strength
Receiver quality

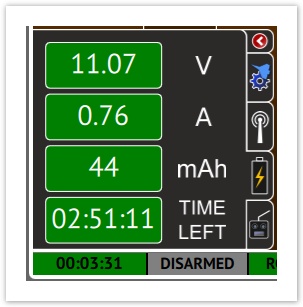
Battery panel
Useful when top is used for Waypoint information, display battery measurements and estimated flight time left based on current intensity and battery capacity.
See Configure a Current-Voltage sensor for more details.
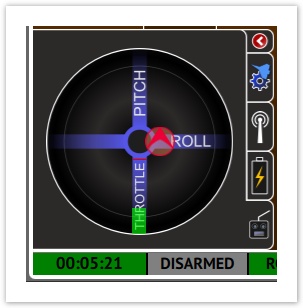
RcInput panel
Display sticks movements
Troubleshooting
My PFD looks reversed
The horizon moves like it would if you were seated in the airplane.
If you roll the vehicle to the right, the display should roll to the left and you can see move "ground" to the right.
Conversely, if you roll the board left, then the horizon (with respect to you) rolls right, so the horizon appears the same as it would as if you were viewing from the cockpit.