| Section | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
| Include Page | ||||
|---|---|---|---|---|
|
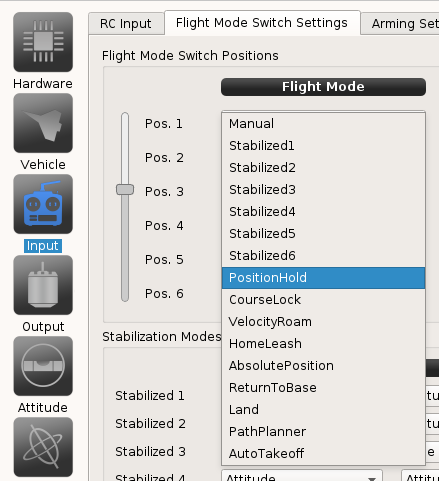
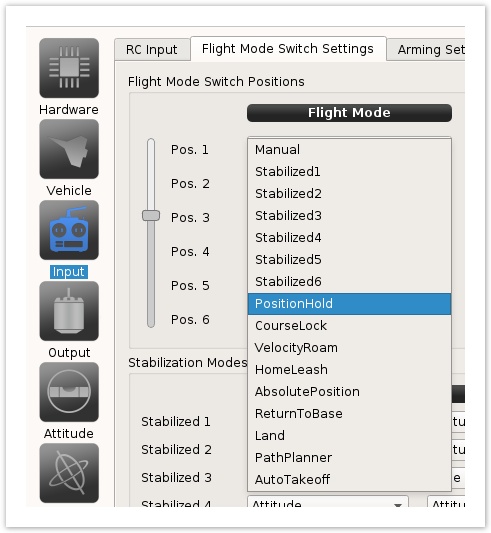
PositionHold
Hold current position, no stick response except Yaw.
Compatible with GPS Assist which enables a brake sequence before entering PositionHold.
See this page: Position Hold
CourseLock
This is a semi autonomous mode.The craft will hold its current course and altitude. The pilot can change both course and altitude using sticks.
...
Position is adjusted in vehicle's own orientation, pitch forward makes vehicle go forward
See also Gps assist page for something similar.
HomeLeash
Hold position, and control it with stick inputs
...
- Offset can be set in FlightModeSettings > ReturnToBaseAltitudeOffset, default is 10 meters
See this page: Return to base
Land
Maintain current GPS position and automatically land the aircraft with ground detection.
See FlightModeSettings > LandingVelocity value (default 0,6m/s)
See this page: Auto Land
PathPlanner
This is a fully autonomous mode.
...
Arm vehicle > Switch to AutoTakeOff flight mode and increase Throttle
...
See this page: Auto Take Off
...