Prerequisites
We assume the GPS is already configured like explained in this page.
19200bauds, Ublox GPS
Remember: CC3D do not support autonomous features.
This GPS setup is only needed if you want to use MinOPOSD (Distance to Home, heading data...). See MinOPOSD setup page.In this page
CC3D setup
Starting from a CC3D board freshly updated / erased.
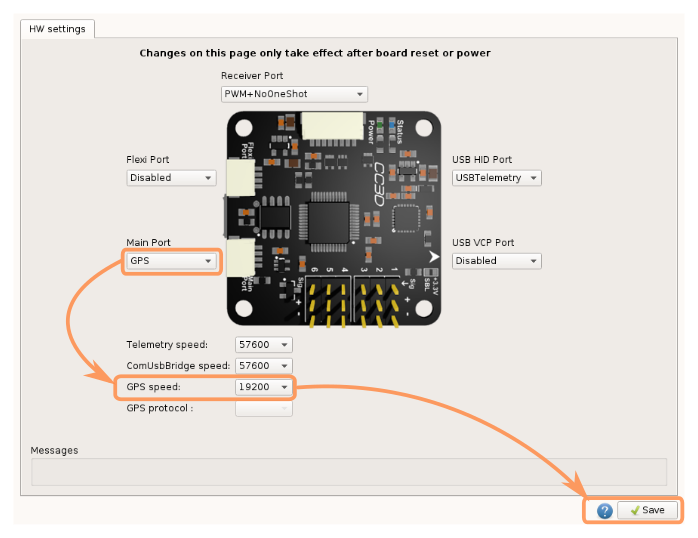
Set GPS port
Go into Hardware tab and setup a GPS port, in this example : MainPort
- Set GPS to MainPort
- Set baudrate to 19200bds
- Save changes
Reboot ( disconnect all power and USB)
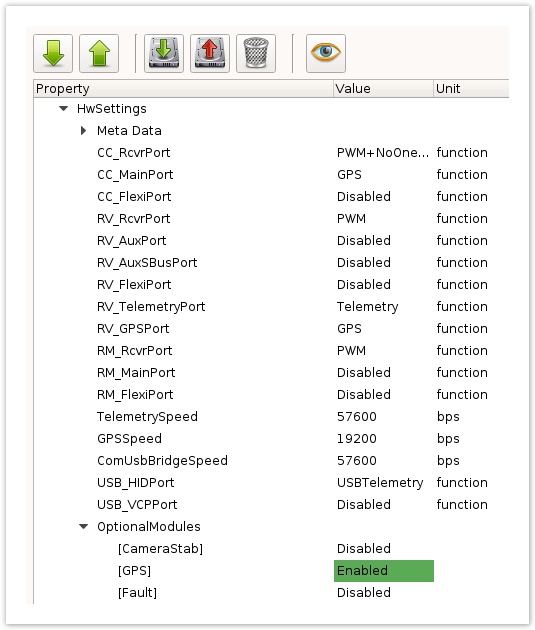
Enable GPS module
Go into System tab > UAVOBrowser > HwSettings > OptionalModules
- Set GPS module to Enabled
- Save changes using the
 upload button
upload button
Reboot ( disconnect all power and USB)
Connect GPS hardware
At this state you should get a red cross over GPS alarm in SystemHealth

- Connect GPS to MainPort
- Power the board with external source, usually +5v from a step down or Esc
If GPS is talking with CC3D you should get a red alarm:

After a successful GPS lock, a orange/green alarm:

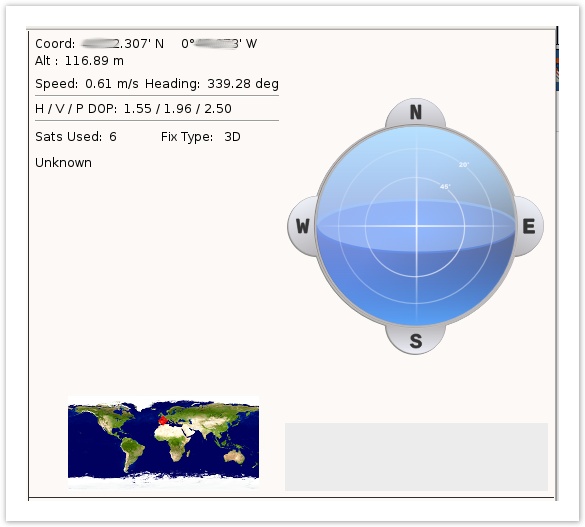
GPS panel display a minimal set of informations:
- Lat/Lon + altitude
- Speed
- Heading (from path direction)
- Number of sats used
- Fix type
- No GPS on skyview, no date/time: This is normal, CC3D works only with a minimal set of messages. Like explained in Configure a GPS for CC3D page.