...
| Section | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
|
| Warning |
|---|
Known Issues:
|
| Operating system | Download Link |
|---|---|
| Windows | |
| OSX | |
| PPA for Ubuntu 15.04+ | $ sudo add-apt-repository ppa:librepilot/release$ sudo apt-get update$ sudo apt-get install librepilot |
| Arch Linux | Available on the AUR or via repository by adding [librepilot] to /etc/pacman.conf |
| Fedora | Repository available here. |
| Info | ||
|---|---|---|
| ||
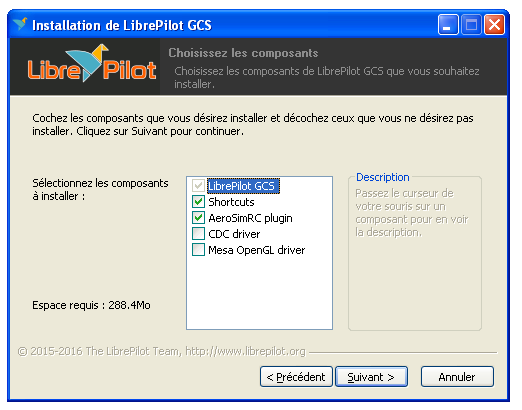
Since 16.09 the CDC driver is not installed by default, it is not needed for normal use excepted if VCP (serial) is needed. If you experienced GCS crash at startup, try installing the MesaOpenGL driver.
|
...