OpenPilot Revolution Nano
- Andraž
- Harold Hankins
- Lalanne Laurent
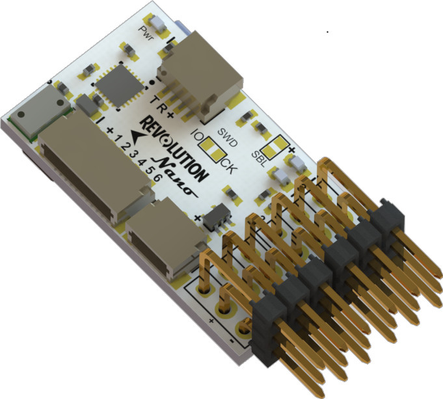
The OpenPilot Revolution Nano is a trimmed down version of the Revolution with an updated 10DoF sensor suite.
Aimed at smaller multirotors, helicopters, fixed wing and even ground based models, it retains the full functionality minus the integrated radio modem and some IO of it's bigger brother and is capable of autonomous GPS navigation.
Hardware Description
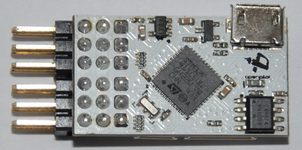
CPU

Nano is powered by a 32bit STM32F411CEU6 ARM Cortex-M4 microprocessor
Sensor Suite


Nano includes a full 10DoF sensor suite with:
- Invensense MPU9250 3 axis digital MEMS Gyro, Accelerometer and Magnetometer on a single chip
- Measurement Specialties MS5611 barometer
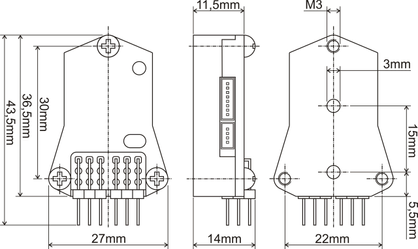
Dimensions

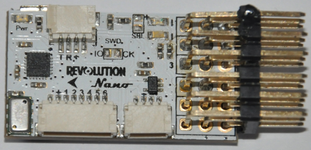
Connectivity
There are several input and output ports available.
Powering the board
Board can be powered with 4,8-15V DC power supply, usually from one of ESCs integrated BECs or an external 5V BEC. The voltage used to power the board will also power any peripheral devices like GPS, Bluetooth modem,... connected to it.
All input/output (Rx, Tx, PWM, etc.) signal levels are 3,3V (5V tolerant)
All Vcc pins are can be used to power the controller and devices connected to it.
PWM Outputs 1-6
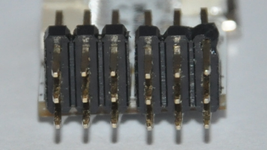
These are PWM outputs used to connect servo motors and ESCs. Outputs 5 and 6 can also be configured as analog inputs
Supported protocols:
- Standard PWM with configurable rate from 50Hz to 490Hz
- PWMSync (PWM synchronized to the gyro sampling rate)
- OneShot125
Pinout:
PWM Out 6 (Analog In ADC5) | PWM Out 5 (Analog In ADC6) | PWM Out 4 | PWM Out 3 | PWM Out 2 | PWM Out 1 |
| Vcc | Vcc | Vcc | Vcc | Vcc | Vcc |
| GND | GND | GND | GND | GND | GND |
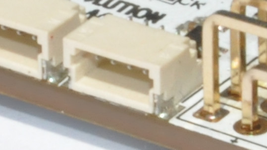
FlexIO


Primarily used as the receiver port supporting PWM and PPM receivers but can also be used as up to 6 additional PWM outputs and analog inputs.
The connector used is an 8pin JST-SH.
Pinout:
| Pin | Wire Color | PWM In | PPM In | PWM Out | Analog In | |
|---|---|---|---|---|---|---|
| 1 | Black | GND | ||||
| 2 | Red | Vcc (4,8-15V DC) | ||||
| 3 | White | Channel 1 | PWM Output 7 | |||
| 4 | Blue | Channel 2 | PPM Sum | PWM Out 12 (note 1) | ADC 0 | |
| 5 | Yellow | Channel 3 | PWM Out 8 (note 2) | ADC 1 | ||
| 6 | Green | Channel 4 | PWM Out 9 (note 2) | ADC 2 | ||
| 7 | Orange | Channel 5 | PWM Out 10 (note 2) | ADC 3 | ||
| 8 | Violet | Channel 6 | PWM Out 11 | ADC 4 | ||
note 1: Not available if PPM is enabled
note 2: This pin can only work in PWM mode if PPM input is enabled
Main Port

This is a UART serial port with a programmable inverter on the Rx pin. It can be used to connect various serial devices such as GPS receiver, OSD, Telemetry (Bluetooth, OPLink, etc.), S.Bus receiver, DSM satellite receiver...
The connector used is a 4pin JST-SH.
Pinout:
| Pin | Wire Color | Telemetry | GPS | OSD | DSM | S.Bus |
|---|---|---|---|---|---|---|
| 1 | Black | GND | ||||
| 2 | Red | Vcc (4,8-15V DC) | ||||
| 3 | Blue | Tx | ||||
| 4 | Orange | Rx | DSM In | S.Bus In | ||
The Tx and Rx lines between the controller and device must be connected: Rx to Tx and Tx to Rx. If you connect Rx to Rx and Tx to Tx, serial communication will not work.
Flexi Port
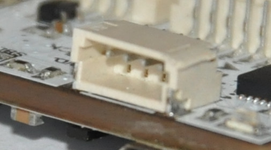
This port can support both UART and I2C serial devices, such as external I2C sensors (external magnetometer), GPS, OSD, Telemetry, DSM receiver, SRXL receiver,...
The connector used is a 4pin JST-SH.
Pinout:
| Pin | Wire Color | Telemetry | GPS | OSD | DSM | SRXL | I2C |
|---|---|---|---|---|---|---|---|
| 1 | Black | GND | |||||
| 2 | Red | Vcc (4,8-15V DC) | |||||
| 3 | Blue | Tx | SCL | ||||
| 4 | Orange | Rx | DSM In | SRXL In | SDA | ||
The Tx and Rx lines between the controller and device must be connected: Rx to Tx and Tx to Rx. If you connect Rx to Rx and Tx to Tx, serial communication will not work.
USB Port
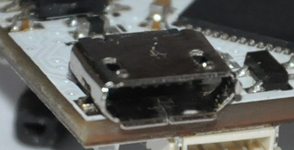
A standard Micro-B USB connector such as found on most modern cell phones used to connect to the PC.
The flight controller presents itself to the PC as a HID (Human Interface Device) and VCP (Virtual Comm Port) device.
The HID part comes configured for telemetry and is used to configure, update and debug your flight controller.
The VCP can be used for telemetry, debug console and ComBridge functionality which binds Main or Flexi port to be used as a com port from your PC (useful for configuring your OSD without needing to rip it out of your airframe)
This connector will provide power to the processor and sensors but will not power any externally connected devices.
SWD Pads

Serial Wire Debug port can be used by developers to flash and debug firmware on the STM32F4 micro-controller using something like a STM32 Discovery board or ST-Link programmer.
There are serial clock (CK) and data (IO) lines as marked, power and ground can be connected elsewhere.
Normal users should never have to use these port.