Introduction
Airspeed sensor are used for fixed wing setup and feed extra flight information for PathFollower or simply detect stall state.
This page describes how to setup a analog airspeed sensor using a Revolution, Revolution Nano or Sparky2board.
Others airspeed sensors that use i2c port are already supported using the vehicle setup wizard
Hardware
Airspeed sensors estimates the air speed using a differential pressure sensor and a pitot tube.
Pitot tube has two pipes, one for static pressure (side of tube) and other for dynamic pressure in front of tube.
Two differential analog sensors are supported: MPXV7002DP and MPXV5004DP
Connections are pretty simple: Gnd, +5V and analog voltage proportional to the airspeed.
Sensor can be connected in various ports, according to the board you use. See next part.

APM analog airspeed sensor
Select the analog input
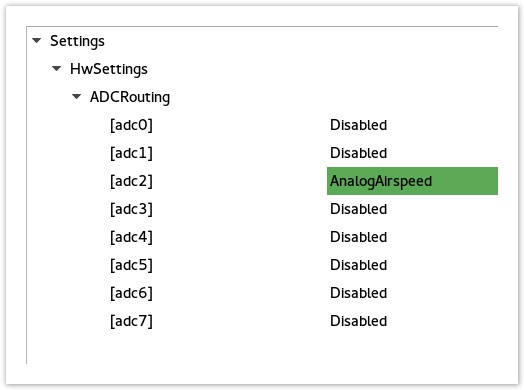
Go to the UAVOBrowser > Settings > HwSettings > ADCRouting and select the adc input pin used for AnalogAirspeed function.
The output port 5 is a good choice for for airspeed input, still free to use for most fixed wing setups and easy to connect using a servo connector.
Here is the adc mapping for various boards:
| Board | adc0 | adc1 | adc2 | adc3 | adc4 | adc5 | adc6 |
|---|---|---|---|---|---|---|---|
| Revolution | Sonar port pin 3 | Sonar port pin 4 | Output port out 3 | Output port | Output_port | Output port | internal |
| Sparky2 | Sonar port pin 3 | Sonar port pin 4 | Output port out 3 | Output port | Output_port | Output port | internal |
| RevoNano | FlexiIO | FlexiIO pin 5 | FlexiIO pin 6 | FlexiIO pin 7 | FlexiIO pin 8 | Output_port out 5 | Output port out 6 |
FlexiIO refers to the receiver port
Configuring sensor
Choose sensor type
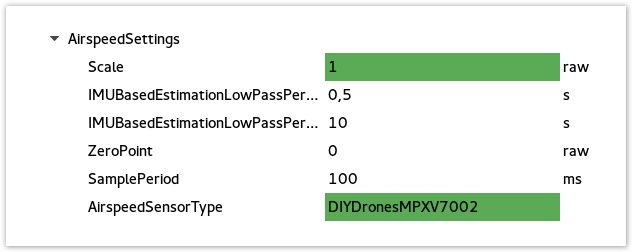
Go to the UAVOBrowser > Settings > AirspeedSettings and select the sensor type you use: MPXV7002 or MPXV5004
Calibrate sensor
At this point you can do some flight testing and compare the average airspeed value and GPS ground speed using a OPlink.
Doing circles at a stabilized cruise speed you can notice the wind that increase airspeed when wind is in front and reduce airspeed when wind is on back, for almost similar ground speed from pilot point of view.
You may need to find the Scale value to measure a almost accurate airspeed value.
About analog sensors
Keep in mind those sensor are cheap, not really linear or temperature compensated.
As a side effect, the temperature can affect the ZeroPoint value set automatically at start up and when the sensor warm, this ZeroValue vary on sensor side.
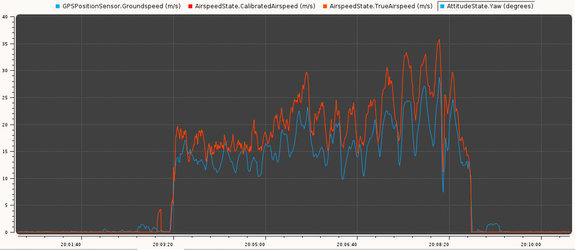
Almost calibrated sensor, the airspeed factor still a little high.