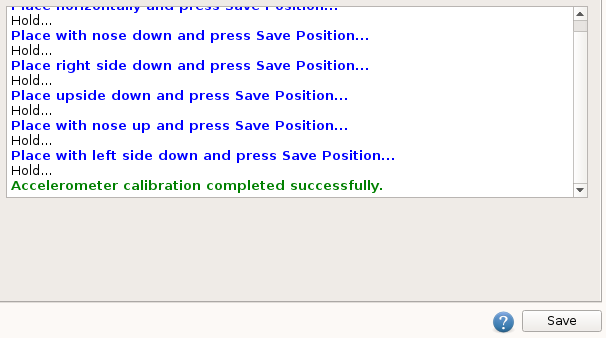
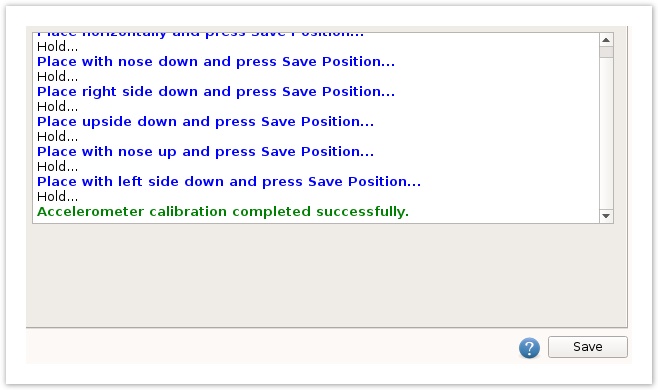
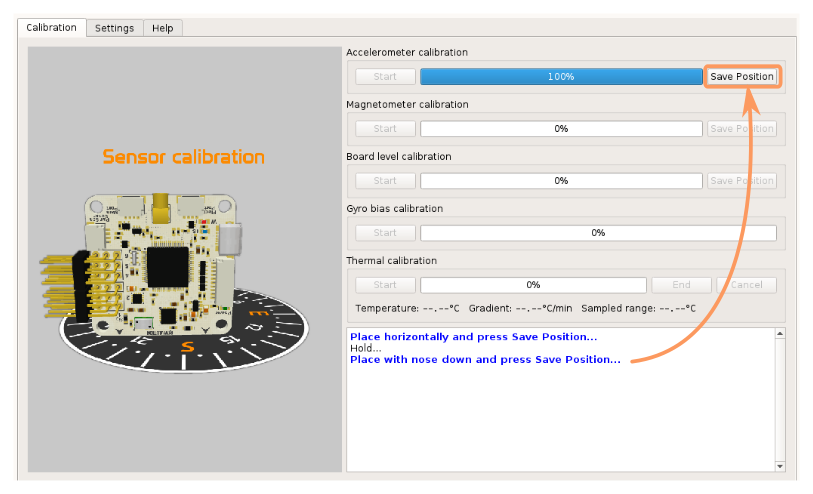
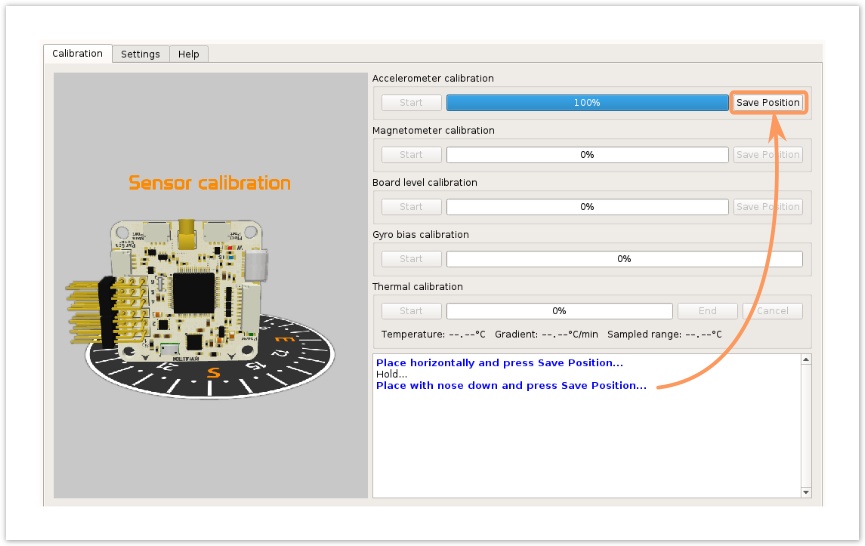
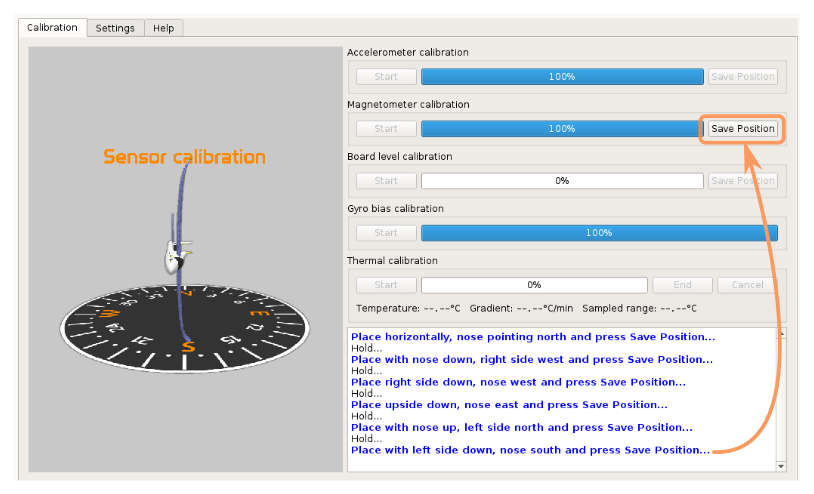
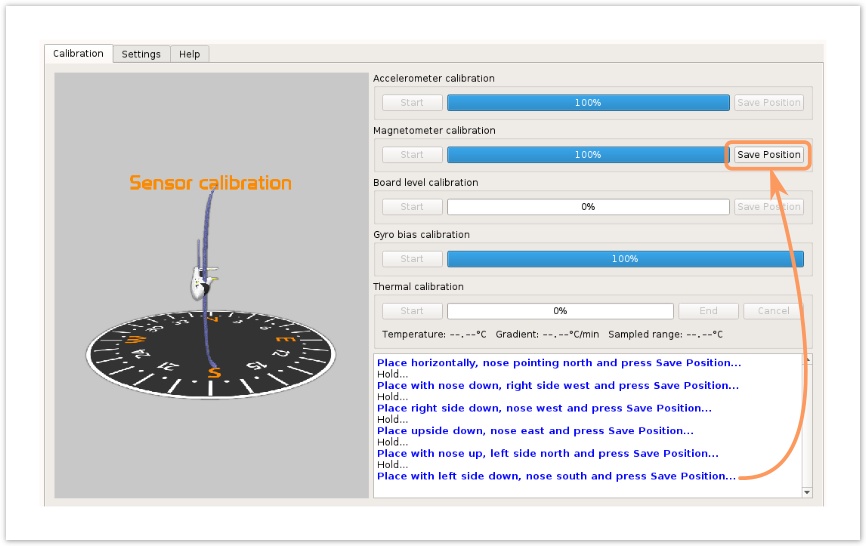
Prior to magnetometer calibration, the Home Location need to be set, please look the Setting Home location page. Using the know location and the World Mag Model data , the controller computes the Mag vector expected. Be sure the controller is mounted on frame in his final configuration, power wires twisted and away from unwanted electromagnetic fields. To initiate the magnetometer calibration, press the Start button. Follow the onscreen instructions, orienting the controller as shown and pressing Save Position at each step. There is no need to align the vehicle exactly south, north, east or west during the individual steps. The directions indicated serve only to tell you in which direction the airframe should be positioned relative to some point. One can simply assume that North is in front of you, East is to the right, West is to the left and South is pointing at you. Another method consist on validate the five first steps, move/rotate vehicle on all axis and finally save the last step. Calibration should be performed outdoors, Oplink or Bluetooth connection give best results.
After mag calibration is successful, save calibration results with Save button. |