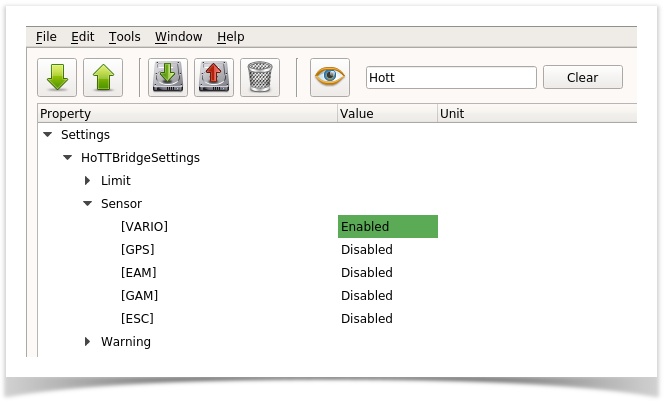
IntroductionHoTT telemetry was introduced by Graupner into his RC radio and allow connecting various sensors to the receiver. A Revolution, Revonano or Sparky board can emulate this modules and send telemetry data to the radio. The following modules can be enabled: - Vario
- GPS
- EAM (Electric Air Module)
- GAM (General Air Module)
- ESC
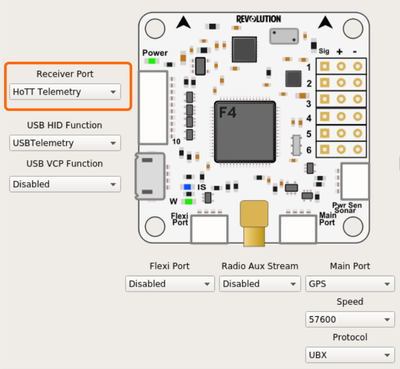
WiringHoTT receiver can be connected to the Mainport or FlexiPort and FlexiIO (receiver port) on Revolution board. 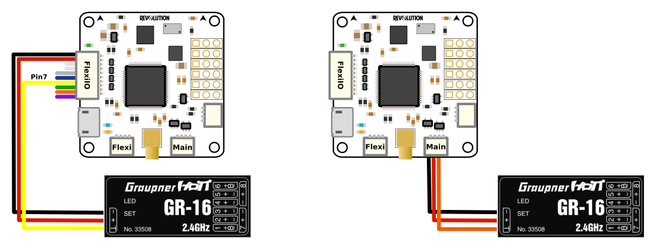
|