...

Figure 1 Hardware Architecture
A typical UAV or Model Aircraft will be controlled by a human operator with a remote control transmitter. It’s signals will be received by some sort of receiver, which in some cases would directly control the actuators. In case of multicopers and other vehicles with augmented control, a flight controller sits in between to interpret the control commands, then runs control algorithms on the vehicle. For this it is fusing information from integrated sensors typically forming an Inertial Measurement Unit (IMU) as well as possible auxiliary sensors such as a GPS receiver. The controller then steers the actuators such as engine controllers and servos.
2 Software Architecture


Figure 2 Software Architecture
...
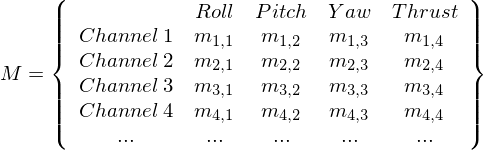
These virtual control channels are mapped to physical actuators using a Mixer Matrix which is stored in the MixerSettings UAVObject along with information about the channel type.
3.1 Manual Control
...