The Return to Base (RTB) flight mode uses the full range of sensors available on controller to accurately return to the Home Location without any pilot input.
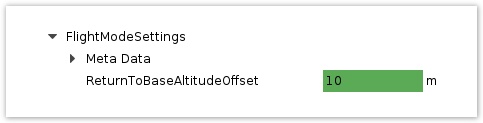
By default, the vehicle will climb to 10 meters above its current position when the Return To Base flight mode is activated. This add a margin of safety for the return flight in order to avoid obstacles.
Value of offset can be set in UAVOBrowser: Settings > FlightModeSettings > ReturnToBaseAltitudeOffset. and value in meters.
Save settings using button.
Column
width
40%
...
Take Off Location mode
Section
Column
width
60%
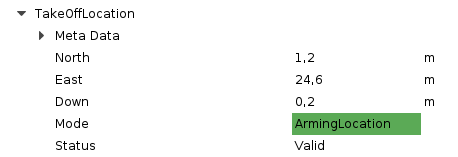
TakeOffLocation can be configured to return to either the ArmingLocation, or FirstArmingLocation.
Value can be set in UAVOBrowser: Settings > TakeOffLocation > Mode
The default setting to "ArmingLocation" to return to the point of takeoff is recommended in most instances.
Save settings using Image Added button.
Column
width
40%
Image Added
...
Return to base next command
Section
Column
width
60%
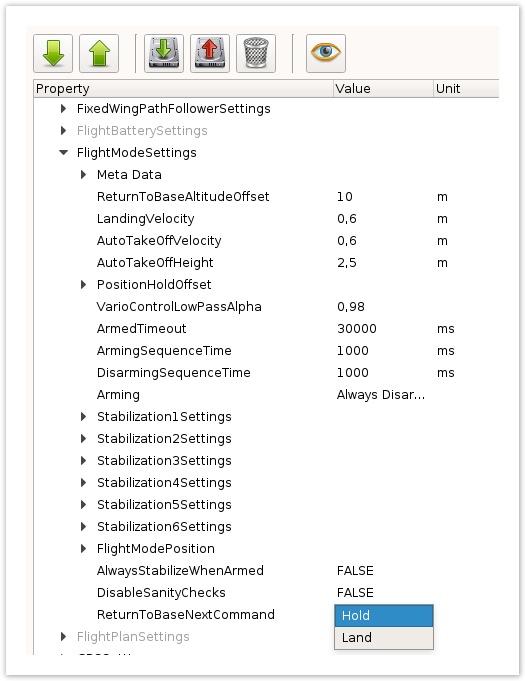
This option only applies to Multirotors, after a Return to Base the default behavior is Hold position when Home position is reached.
Another alternative is a Land phase after Return to Base.
Value can be set in UAVOBrowser: Settings > FlightModeSettings > ReturnToBaseNextCommand. and choose between Hold or Land.