This allow vehicle control using a computer and a joystick connected.
Prerequisites
A vehicle already tuned and configured.
A telemetry link with vehicle already configured, usually OPLink at 57600bauds.
A working joystick connected to computer

Thrustmaster Joystick T.16000M example
Diagram

Video example
GCS setup
- Connect joystick before start Gcs.
- Start GCS and go to Flight Data tab
- Change layout: Window menu > Edit Gadgets mode and replace ModelView with a GCS controller
- Open a RC panel in PFD
- Enable controller using the "GCS Control" checkbox
- Go to Tools > Options > Controller
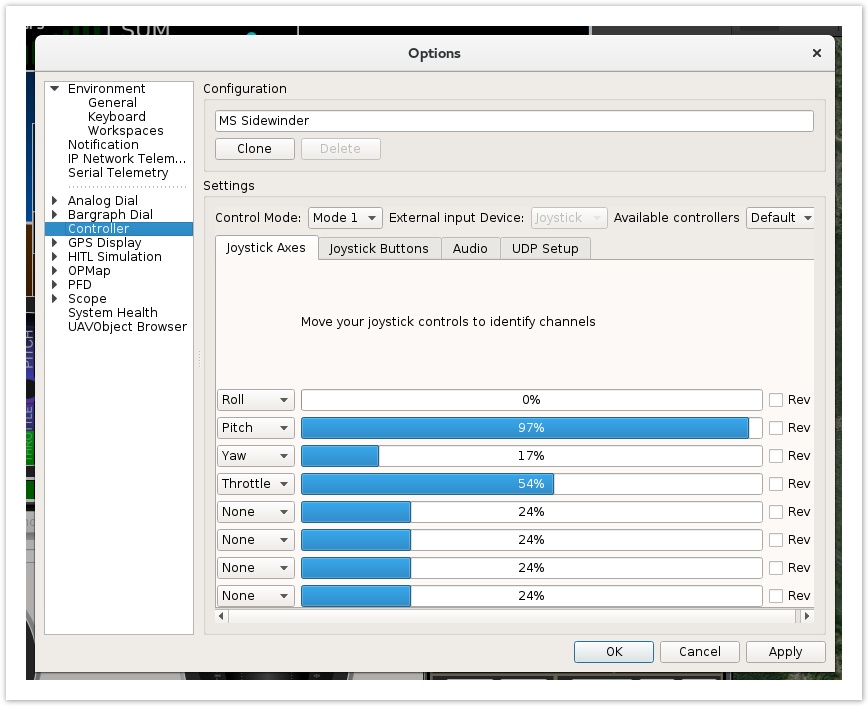
- Choose a RC mode for controller display. Mode1 for example.
- Move joystick and affect all axis + Throttle, apply changes and double check if sticks move correctly. Reverse channel if needed.
Joystick input is configured now, at this point all is working without a flight controller connected.
Vehicle configuration
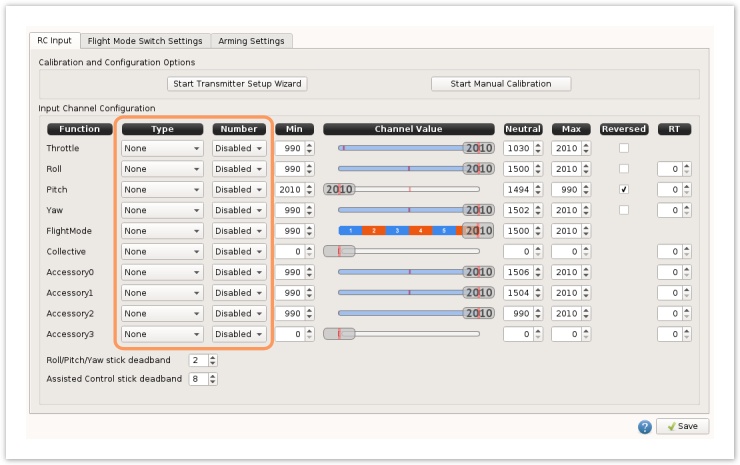
Disable Rc input
Set all Rc Input type to None, this disable regular RCinput used who can interfere with GCS control wanted using joystick.(forced failsafe mode or valid input from Rc transmitter)
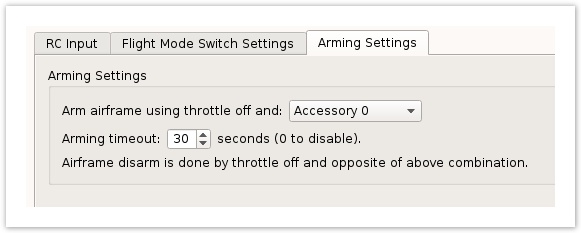
Arming settings
Set the arming setting to Accessory0, this is the default arming channel using GCS controller.
Operate vehicle using GCS Controller
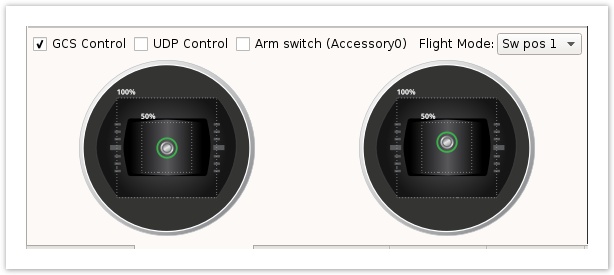
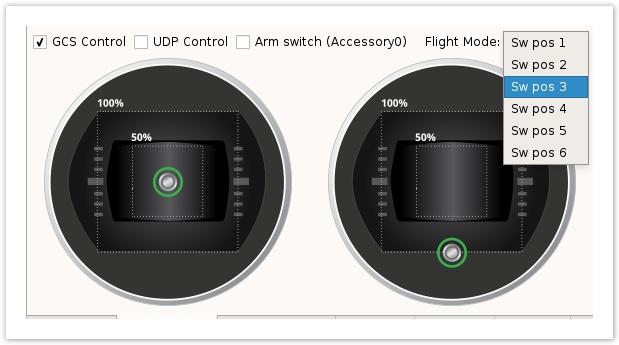
Checkboxes:
- GCS control: Enable / Disable GCS controller
- UDP control: not used in this example.
- Arm switch: Used for arming
Flight Mode: Select the flight mode needed according to the Flight Mode settings defined in Input tab.
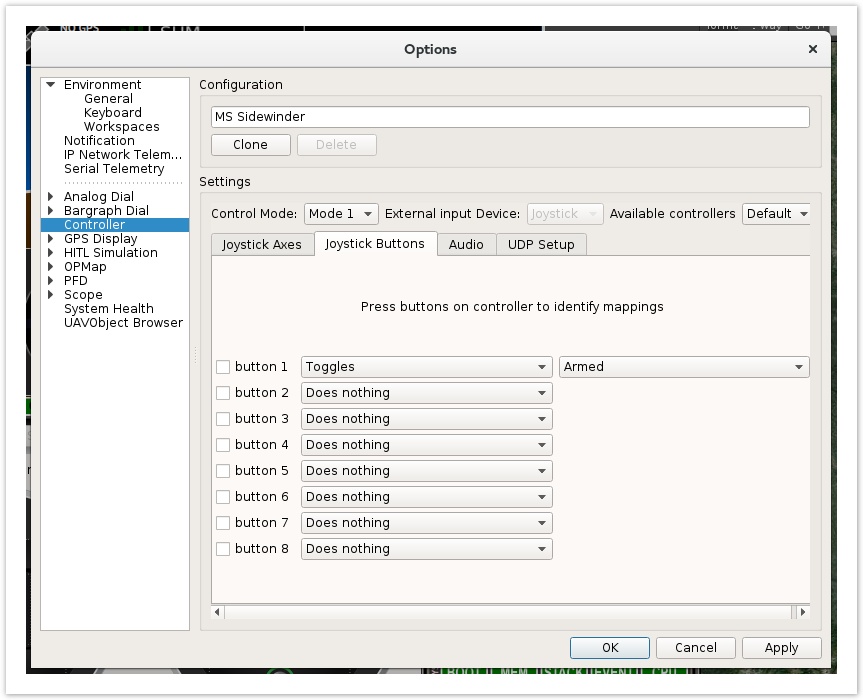
Any joystick button can be affected to arming.
Test the button used for arming, set to "toggles" > armed
Beware to not disarm in flight !