The Return to Base (RTB) flight mode uses the full range of sensors available on controller to accurately return to the Home Location without any pilot input.
This assumes the Home Location is set correctly and previously a basic PositionHold mode works perfectly.
CC3D GPS Navigation
| CC3D and Atom boards do not support GPS navigation features like RTH, PosHold, waypoints... Only Revolution, Revolution Nano and Sparky2 can use GPS for navigation. |

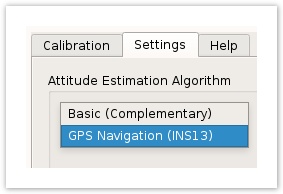
Set Attitude Estimation Algorithm
To use all the navigation features using GPS,select the GPS navigation (INS13) attitude estimation algorithm
Go into Attitude page > Settings > Attitude Estimation Algorithm, select GPS Navigation INS13, and Save.
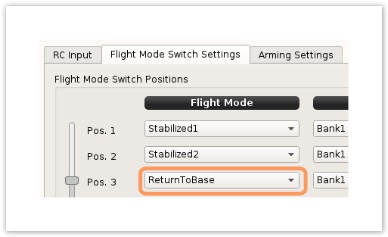
Set the flight mode
Go into Input page > Flight Mode Switch Settings and affect ReturnToBase to one flight mode position.
When engaged, Return to Home Location in a straight line and stay into Position Hold when it gets there without user input.
Optional settings
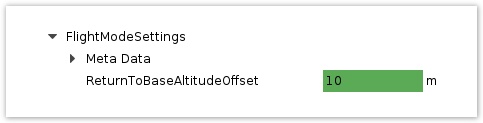
Return to base altitude offset
By default, the vehicle will climb to 10 meters above its current position when the Return To Base flight mode is activated. This add a margin of safety for the return flight in order to avoid obstacles.
Value of offset can be set in UAVOBrowser: Sysnem tab > Settings > FlightModeSettings > ReturnToBaseAltitudeOffset. and value in meters.
Save settings using  button.
button.
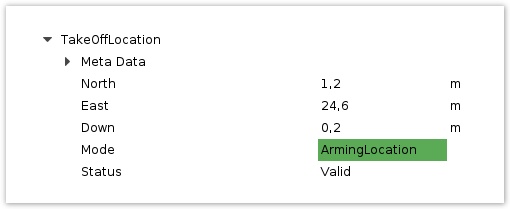
Take Off Location mode
TakeOffLocation can be configured to return to either the ArmingLocation, or FirstArmingLocation.
Value can be set in UAVOBrowser: Settings > TakeOffLocation > Mode
The default setting to "ArmingLocation" to return to the point of takeoff is recommended in most instances.
Save settings using button.
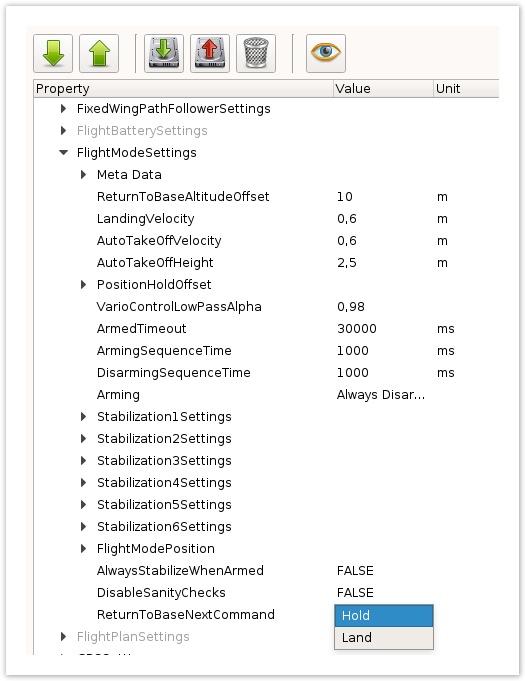
Return to base next command
This option only applies to Multirotors, after a Return to Base the default behavior is Hold position when Home position is reached.
Another alternative is a Land phase after Return to Base.
Value can be set in UAVOBrowser: Settings > FlightModeSettings > ReturnToBaseNextCommand. and choose between Hold or Land.
Save settings using button.