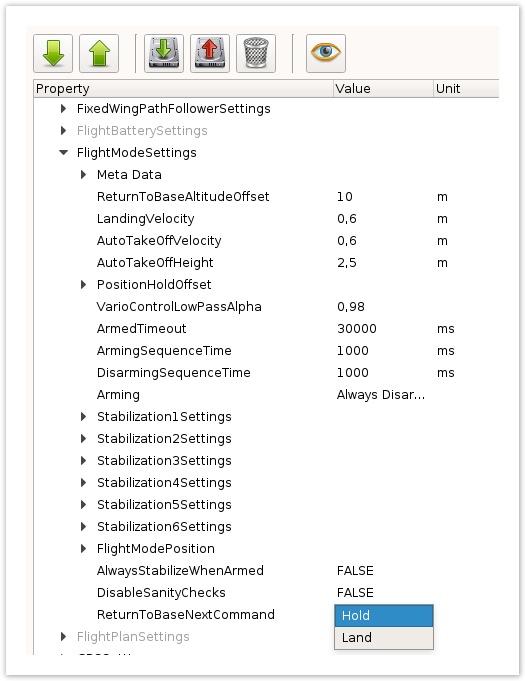
This option only applies to Multirotors, after a Return to Base the default behavior is Hold position when Home position is reached. Another alternative is a Land phase after Return to Base. Value can be set in UAVOBrowser: System tab > Settings > FlightModeSettings > ReturnToBaseNextCommand. and choose between Hold or Land.
Save settings using  button. button. |