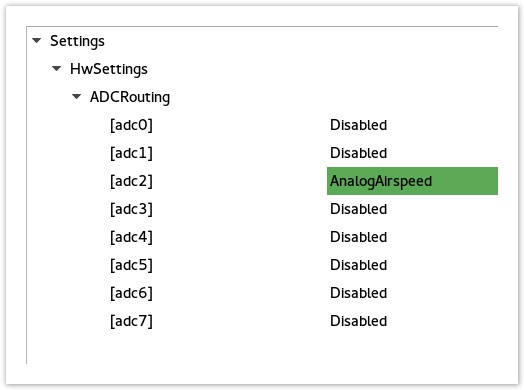
Go to System > UAVOBrowser > Settings > HwSettings > ADCRouting and select the adc input pin used for AnalogAirspeed function. Output port 5 is a good choice for the airspeed input, it's still free to use for most fixed wing setups and easy to connect using a servo connector. Here is the adc mapping for various boards: | Board | adc0 | adc1 | adc2 | adc3 | adc4 | adc5 | adc6 |
|---|
| Revolution | Sonar PWR port
pin 3 | Sonar PWR port
pin 4 | Output port
out 3 | Output port
out 4 | Output_port
out 5 | Output port
out 6 | internal | | Sparky2 | PWR port
pin 3 | PWR port
pin 4 | PWR port
pin2 | Output port
out 3 | Output port
out 4 | Output_port
out 5 | Output port
out 6 | | RevoNano | FlexiIO
pin 4 | FlexiIO
pin 5 | FlexiIO
pin 6 | FlexiIO
pin 7 | FlexiIO
pin 8 | Output_port
out 5 | Output port
out 6 |
FlexiIO refers to the receiver port |