...
In control Modes that involve the Autopilot, the craft is flown by the Flight Controller based on the trajectory instructions in the PathDesired UAVObject. This is initialized to the current position in “Position Hold”, set dynamically based on the ManualControlCommand in various assisted flight modes, or might even be set by the Navigation Computer implemented in PathPlanner module, which traverses a conditional graph of waypoint coordinates.
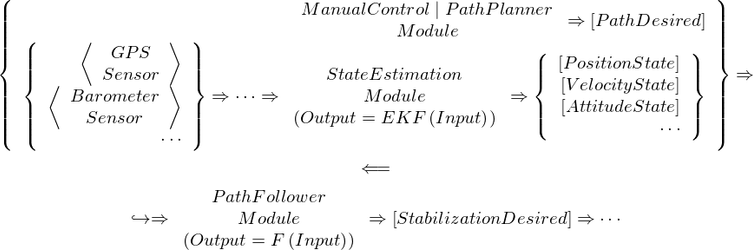
The control algorithm F varies based on vehicle type and also the PathMode requested in the PathDesired UAVObject. At the time of writing this document the supported control modes are:
...