Airspeed sensors estimate the air speed using a differential pressure sensor and a pitot tube.
A pitot tube has two pipes, one for static pressure (side of tube) and other for dynamic pressure in front of the tube. Two differential analog sensors are supported: MPXV7002DP and MPXV5004DP
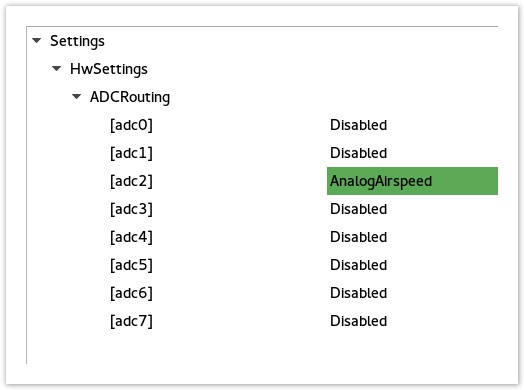
Connections are pretty simple: Gnd, +5V, and analog voltage proportional to the airspeed. The sensor can be connected to various ports, according to the board you use. See next part. Sensor position You may choose a good place for your pitot tube, the static pressure should not be disturbed by aerodynamic effects that artificially increase the static pressure due to a too close fuselage or wing. 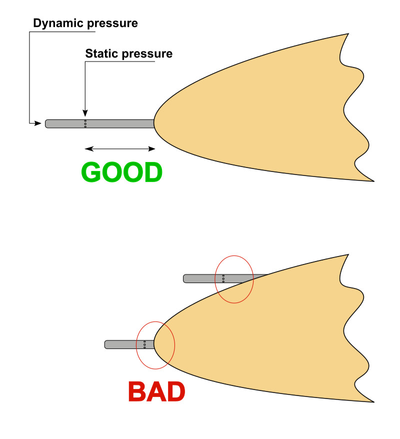
|