| Section |
|---|
| Column |
|---|
| This page describes the contents of the Input tab. Four tabs - RC Input to configure the controls,
- Flight Mode Switch Settings to configure how the different flight modes can be selected,
- Failsafe settings to configure the default controls values while failsafe is triggered,
- Arming Settings to configure the input required to arm the model.

|
|
...
| Key | Description |
|---|
| 1 | The two buttons at the top of the page start the Transmitter Setup Wizard, and the Manual Calibration process for the inputs.
If all input channels are already correctly configured Manual Calibration can be used to reflect some Rc Transmitter changes, be sure to move ALL sticks and switches to their maximum. |
| 2 | Tells the user about input activity, useful to find the channel assigned to one stick movement or a channel with gitter. |
| 3 | This table links the function with the RC input type and channel, and also allows configuration of signal range.
The best way to configure this is to run the transmitter wizard, which will guide you through this process step by step.
Deadband allows some float in the neutral position. |
...
Mixed input types
| Section |
|---|
| Column |
|---|
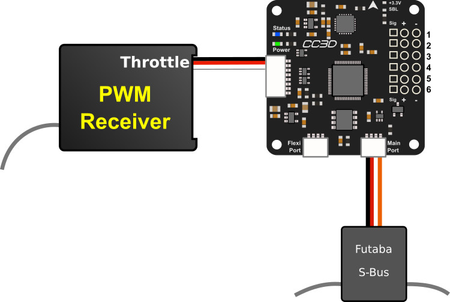
| Mixed input types can be used, like one channel using PWM and others using S.Bus. This means the hardware tab has this input types configured previously. 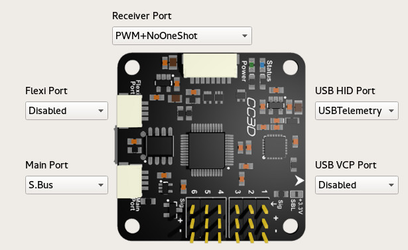
|
| Column |
|---|
| 
|
|
...
| Key | Description |
|---|
| 1 | Refers to the flightmode position to use while the failsafe is triggered. |
| 2 | Failsafe values can be set here, in percent. Positive value if not recommended for Throttle and can give a flyaway instead of a safe "landing". |
There are 2 different Failsafe twpestypes: one in the RC RX, receiver and the other in the FC Flight Controller (this Tab).
| Flight Controller Failsafe: |
...
- only takes over if the RC system stops sending pulses (or generally stops sending signal to the FC)
|
...
- the default for the FC failsafe is to stop motors and drop from the sky
|
...
- can be set to go to any flight mode switch position AND ALSO has an associated set of control stick positions.
|
RC Failsafe |
...
- the RC failsafe works differently in different brands, and even works differently depending on whether the transmitter has been switched on since the receiver was powered up
|
...
- .
- RC failsafe may do any of these depending on brand and setting:
|
...
- none (always stops the signal so the FC failsafe always takes over, safe
|
...
...
- go to previously selected position (if the receiver has "seen" the transmitter to get these values, and then the transmitter goes away for some reason, else don't send pulses, generally this RC failsafe needs to be programmed to go to a specific flight mode switch position and the FC failsafe is unused)
|
...
- always maintain the last set of received stick positions (unsafe, this one is a fly-away waiting to happen as you can imagine).
|
...
Arming Settings

The position of the sticks or Accessory (switch) used for arming the quad are configured here, together with the time out to disable. The airframe is also disarmed manually by the opposite combination of stick positions.
Timeout can be set to zero for Fixed Wing frame, this allow minimal Throttle / gliding phase without disarming board.
...